SPI总线
一 功能简介
SPI x2,SPI Slave x1
- 支持 National’s Microwire,TI’s SSP 和 Motorola’s SPI
- 支持 Full-duplix,transimit-only 和 receive-only
- 传输字节序可配置:MSB 或 LSB
当不能正常使用SPI控制器驱动时, 请使用SPI控制器驱动所使用到的IO引脚来配置GPIO_SPI驱动, 从而验证是硬件出现异常还是SPI控制器驱动出现异常
二 硬件SPI配置方法
以PD_X2600_EVB_V2.0开发板为例 ,使用x2600e_vast_nand_defconfig配置 , 实际根据硬件需要配置
SPI控制器驱动配置

三 GPIO模拟SPI配置方法

四 SPI测试例子
4.1 测试代码
代码位于freertos/example/driver/spi_example.c
#include <common.h>
#include <driver/spi.h>
#include <driver/gpio.h>
#include <os.h>
struct spi_config_data config = {
.id = 0,
.cs_pin = GPIO_PB(00), /* 指定 GPIO 作为 CS 引脚 */
.clk_rate = 1 * 100 * 1000, /* 配置时钟频率 */
.cs_valid_level = Spi_valid_high, /* 配置spi有效电平为高 */
.tx_endian = Spi_endian_msb_first,
.rx_endian = Spi_endian_msb_first,
.bits_per_word = 8, /* 数据位宽 8,即传输过程中的最小数据单位为8bit */
.spi_pha = 0,
.spi_pol = 0,
.loop_mode = 0,
};
void spi_test(void *data)
{
u8 tx_buf1[] = {0x01, 0x02, 0x03 ,0X04, 0x05, 0x06, 0x07 ,0x08};
u8 rx_buf1[64];
u8 tx_buf2[] = {0x11, 0x12, 0x13 ,0X14, 0x15, 0x16, 0x17 ,0x18};
u8 rx_buf2[64];
int len1 = sizeof(tx_buf1)/sizeof(tx_buf1[0]);
int len2 = sizeof(tx_buf2)/sizeof(tx_buf2[0]);
struct spi_message msg[] = {
{
.tx_buf = tx_buf1, /* tx_buf可以为空,表示只接收不发送 */
.rx_buf = rx_buf1, /* rx_buf可以为空,表示只发送不接收 */
.tlen = len1, /* tlen 可以为 0,表示只接收不发送 */
.rlen = len1, /* rlen 可以为 0,表示只发送不接收 */
.cs_change = 1, /* 第一个transfer结束改变 cs 电平, 0 表示传输结束不改变 */
},
{
.tx_buf = tx_buf2,
.rx_buf = rx_buf2,
.tlen = len2,
.rlen = len2,
.cs_change = 0, /* 最后一次传输结束都将改变 cs 电平 */
},
};
struct spi_device *spi = spi_register(&config);
spi_transfer(spi, msg, sizeof(msg)/sizeof(msg[0]));
printf("len1 = %d, rx_buf = %x, %x\n", len1, rx_buf1[0],rx_buf1[len1-1]);
printf("len2 = %d, rx_buf = %x, %x\n", len2, rx_buf2[0],rx_buf2[len2-1]);
spi_unregister(spi);
}
void test_main(void)
{
thread_create("spi_test", 2048, spi_test, NULL);
}
4.2 测试程序编译和使用
在freertos/vendor目录下添加测试程序文件spi_example.c, 并在Makefile添加
src-y += vendor.c spi_example.c
在vendor.c中引用spi_example.c中的函数, 并添加相关头文件
#include <stdio.h>
#include <common.h>
#include <driver/spi.h>
#include <driver/gpio.h>
#include <os.h>
void vendor_init(void)
{
printf("vendor init...\n");
spi_test();
}
五 编译和烧录
bhu@bhu-PC:~/rtos$ cd freertos
bhu@bhu-PC:~/rtos/freertos$ source build/envsetup.sh //第一次编译需要初始化编译环境
bhu@bhu-PC:~/rtos/freertos$ make x2600e_vast_nand_defconfig
bhu@bhu-PC:~/rtos/freertos$ make
bhu@bhu-PC:~/rtos/freertos$ ls rtos-with-spl.bin
rtos-with-spl.bin //编译出来的文件
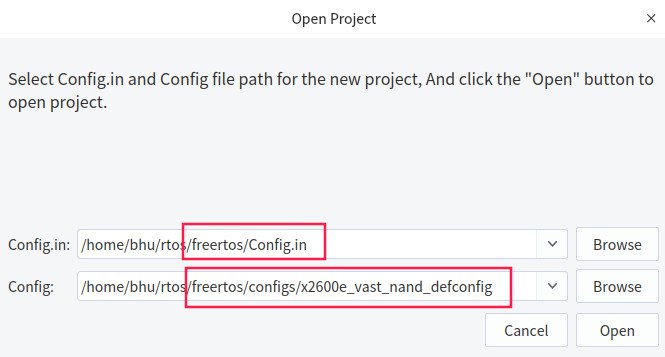
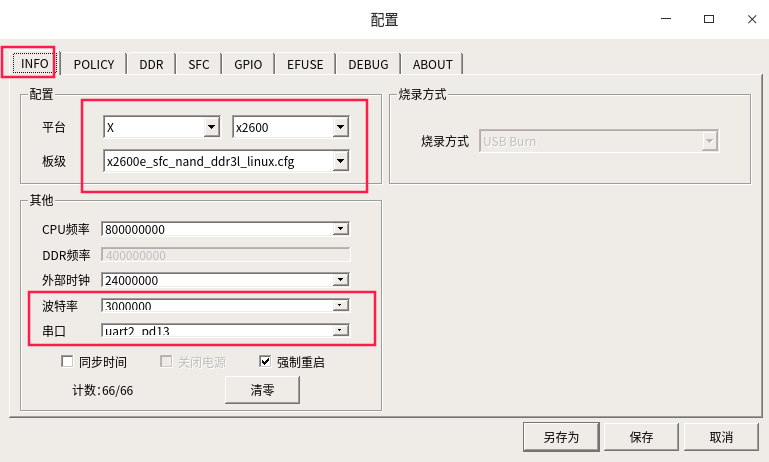
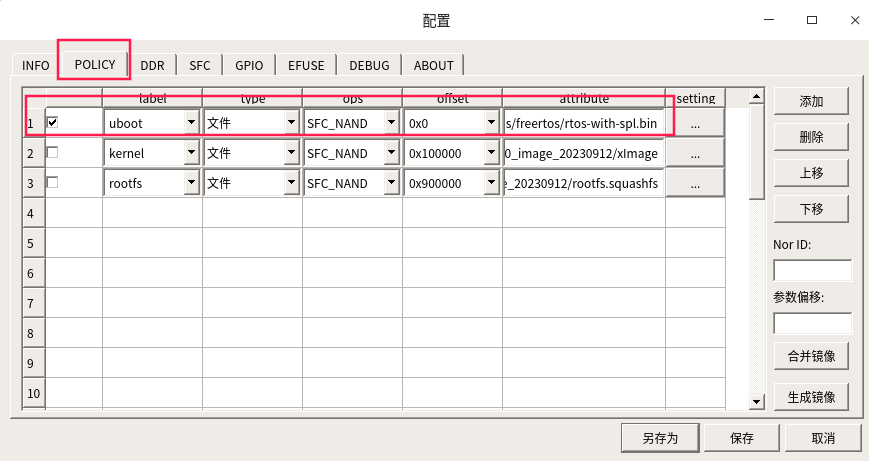
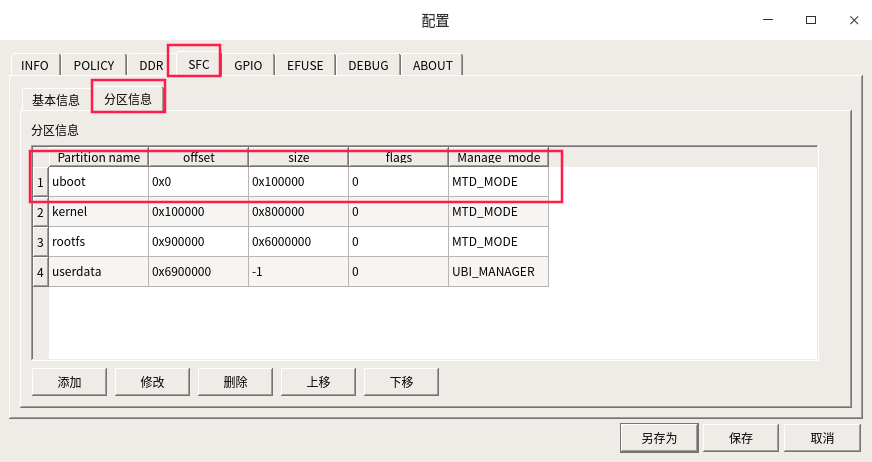
请使用最新版烧录工具
烧录配置
六 测试验证
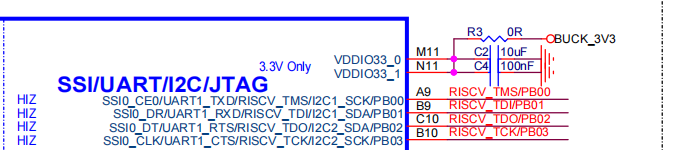
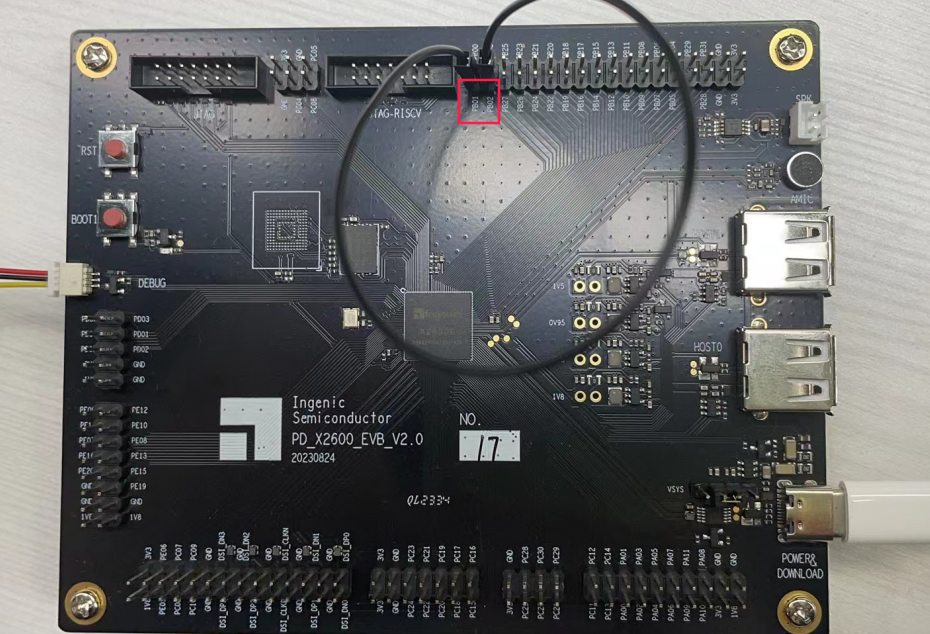
验证需要短接开发板spi0的tx和rx, 根据原理图短接开发板的PB01和PB02
串口打印信息:
[10.107865] vendor init...
[10.107971] SPI0: user set freq: 100000, the real freq: 195312
[10.108878] len1 = 8, rx_buf = 1, 8
[10.108999] len2 = 8, rx_buf = 11, 18
七 硬件SPI应用接口分析
相关源码见freertos/drivers目录下的spi.c
包含头文件:
#include <driver/gpio.h>
#include <driver/spi.h>
spi使用流程:
1.初始化spi,spi_init
2.定义spi配置信息结构体struct spi_config_data
3.配置spi结构体节点,spi_register
4.配置传送/接收结构体,struct spi_message
5.调用传输函数,spi_transfer
6.释放资源,spi_unregister
api详解:
struct spi_device *spi_register(struct spi_config_data *config)
功能:SPI 设备注册
参数:struct spi_config_data *config /*包含spi配置信息*/
返回值:struct spi_device /*SPI从设备句柄*/
void spi_transfer(struct spi_device *spi, struct spi_message *msg, int count);
功能:spi数据传输。
参数:
struct spi_device *spi /*从设备句柄*/
struct spi_message *msg /*msg 结构体,包含传输过程的相关信息*/
int count /*一个msg中包含的transfer的数目*/
"注意:函数运行时会阻塞,在线程上下文使用的时候会引起任务调度,在中断上下文使用时会轮询阻塞。"
void spi_unregister(struct spi_device *spi)
功能:释放SPI资源
参数:struct spi_device *spi /*从设备句柄*/
中间参数详解:
SPI从设备句柄:
struct spi_device { /*spi设备句柄,不需要修改*/
struct spi_config_data config;
int spi_bus_id;
struct spi_bus *spi_bus;
struct list_head link;
};
spi_config_data结构体,包含SPI的配置信息:
struct spi_config_data {
unsigned int id; /*SPI 控制器 ID*/
unsigned int cs_pin; /*指定作为 cs 脚的 GPIO*/
char *name; /*name 仅作为一个标识*/
unsigned int clk_rate; /*时钟频率(默认为 1*1000*1000)*/
enum spi_cs_valid_level cs_valid_level; /*有效电平*/
enum spi_data_endian tx_endian;
enum spi_data_endian rx_endian;
/*数据传输的大小端模式选择,具体可选类型为 spi_data_endian 所定��义的类型*/
unsigned int bits_per_word;
/* bits_per_word 代表数据的位宽.
例如:bits_per_word = 32 时,SPI传输过程中的最小数据单位为32bit.*/
unsigned int spi_pol;
unsigned int spi_pha;
/*
* 极性 spi_pol :
* 当spi_pol=0,在时钟空闲即无数据传输时,clk电平为低电平
* 当spi_pol=1,在时钟空闲即无数据传输时,clk电平为高电平
* 相位 spi_pha :
* 当spi_pha=0,表示在第一个跳变沿开始传输数据,下一个跳变沿完成传输
* 当spi_pha=1,表示在第二个跳变沿开始传输数据,下一个跳变沿完成传输
*/
unsigned int loop_mode; /* 循环模式,可用于测试 */
};
spi_message结构体,包含传输过程的相关信息:
struct spi_message {
/* NOTE:在君正平台下,dma传输需要保证发送和接收的个数相等,其他传输方式不作要求.
* tlen 发送数据的个数.发送数据的大小=发送数据的个数(tlen)*数据对应的字节长度
* rlen 接收数据的个数.接收数据的大小=接收数据的个数(rlen)*数据对应的字节长度
*
* bits_per_word 范围是 0~32;
* 建议选择 8、16、32 作为 bits_per_word 的值,其余的可参考对应的驱动程序.
* 当 bits_per_word = 8,对应的数据字节长度为1.
* 当 bits_per_word = 16,对应的数据字节长度为2.
* 当 bits_per_word = 32,对应的数据字节长度为4.
*/
int tlen;
int rlen;
const void *tx_buf; /* 发送缓冲区 */
void *rx_buf; /*接收缓冲区*/
int use_dma; /*0:不使用dma方式传输;1:使用dma方式传输 */
int cs_change; /*传输结束时,改变cs的状态 */
};
八 GPIO_SPI 应用接口分析
相关源码见freertos/drivers目录下的gpio_spi.c
包含头文件:
#include <driver/gpio_spi.h>
GPIO_SPI使用流程:
在调用注册函数前先调用gpio_spi_add_bus添加总线
在调用注销后调用gpio_spi_remove_bus删除总线
api详解:
struct spi_bus* gpio_spi_add_bus(struct gpio_spi_bus_data *spi);
功能:向总线链表添加总线。节点
参数:struct gpio_spi_bus_data *spi // 总线数据
返回值:总线信息结构体
void gpio_spi_remove_bus(struct spi_bus *spi_bus);
功能:删除总线链表中总线节点。
参数:struct spi_bus *spi_bus // 总线信息
"注意:其他 注册 传输 注销api请参考适配器spi函数,此三个函数与适配器共用同一个接口。"
中间参数详解
gpio_spi总线数据结构体:
struct gpio_spi_bus_data {
int spi_bus_id; // 总线编号
int gpio_dout; // 输出引脚
int gpio_din; // 输入引脚
int gpio_clk; // 时钟引脚
};
"注意:还有结构体参数请参考spi中间参数详解。"
九 SPI shell命令详解
相关源码见freertos/shell/cmds/drivers目录下的cmds_spi.c
9.1 shell命令
spi_read_write <BUS_NUM> <CS_GPIO> <CS_VAILD_LEVEL> <PHA> <POL> <DATA0> [DATA....]
功能:SPI传输
参数:BUS_NUM //spi总线号
CS_GPIO //cs 脚的 GPIO
CS_VAILD_LEVEL //有效电平
PHA //相位(当PHA=0,表示在第一个跳变沿开始传输数据,下一个跳变沿完成传输
//当PHA=1,表示在第二个跳变沿开始传输数据,下一个跳变沿完成传输)
POL //极性(当POL=0,在时钟空闲即无数据传输时,clk电平为低电平
//当POL=1,在时钟空闲即无数据传输时,clk电平为高电平)
<DATA0> [DATA....] //数据(单位:16进制)
example:
spi_read_write SPI0 PC00 1 PHA0 POL0 0x10 0x20
9.2 shell配置

9.3 具体例⼦
验证需要短接开发板spi0的tx和rx, 根据原理图短接开发板的PB01和PB02
$ spi_read_write SPI0 PB00 1 PHA0 POL0 0x10 0x20
rx_buf[0] = 10
rx_buf[1] = 20