X2600 UART
一 功能说明
x2600 的UART功能如下:
- 支持 5,6,7,8-bit 数据位宽
- 支持奇校验或偶校验
- 支持 1, 1½, or 2-bit 停止位
- 支持流控
- 支持 IrDA1.1
- 最大 3M 波特率
- 支持 DMA 传输
- 支持PIO 传输
- 硬件有8路UART可以同时通讯
二 硬件环境说明
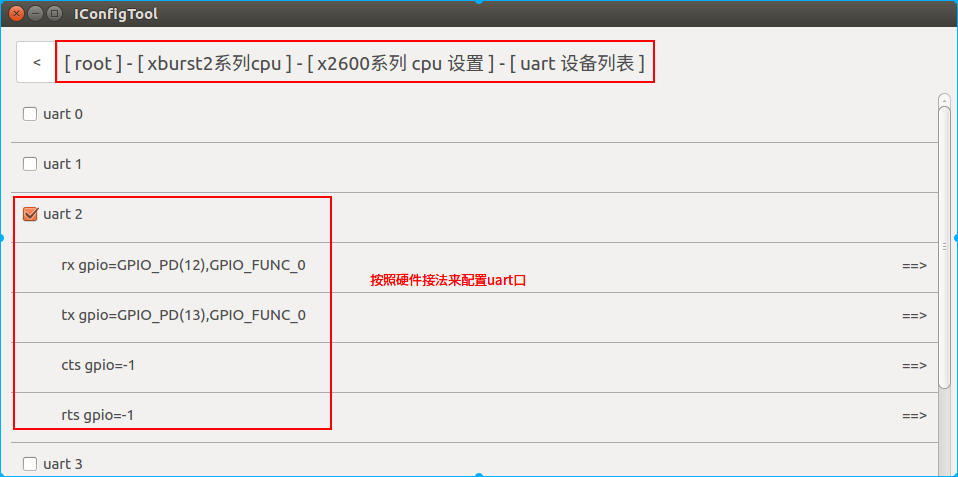
本文档以PD_X2600_VAST_V2.0开发板为例,演示UART2(PD12, 13)作为printf 输出系统log信息口的配置及运行。
同时演示UART0(PE09, 10)短接TX和RX后自收自发的配置和运行。
根据硬件原理图,UART0对应PE09,10:

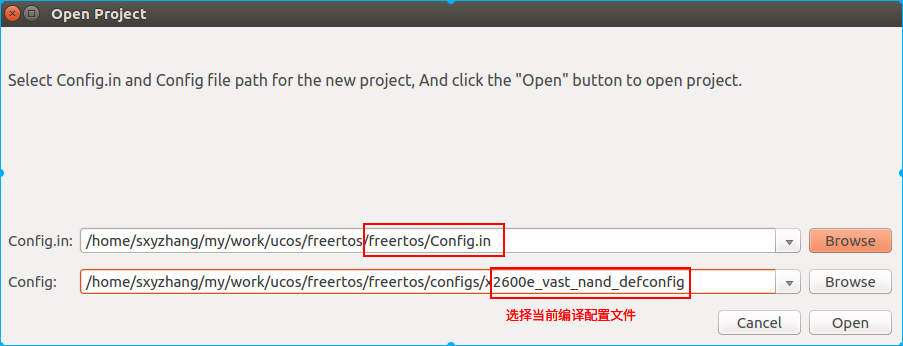
三 软件实现
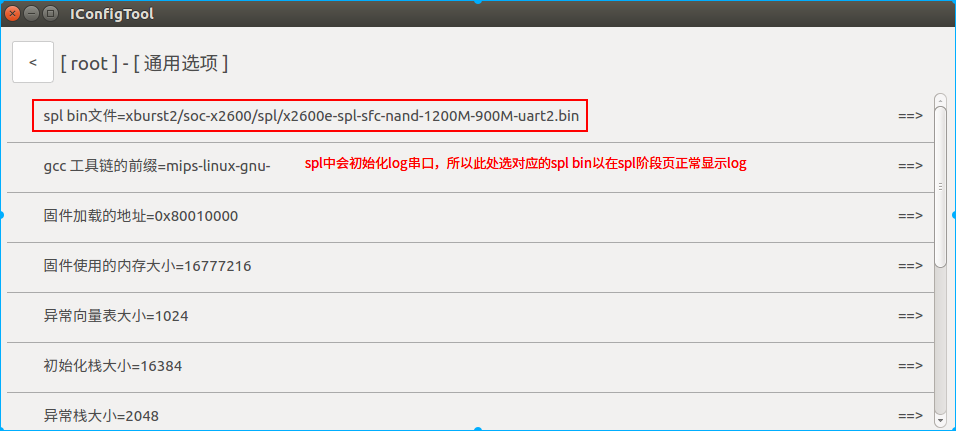
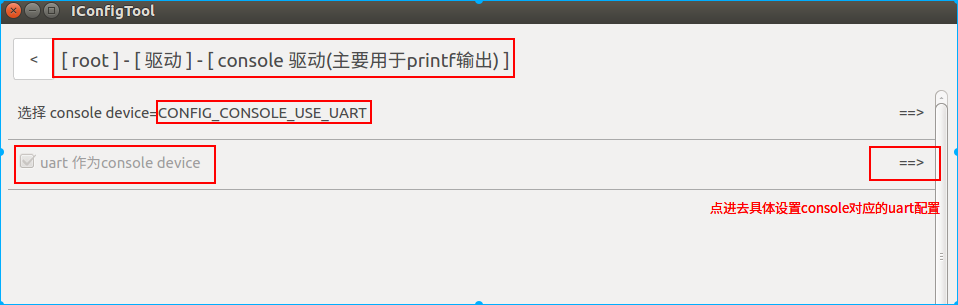
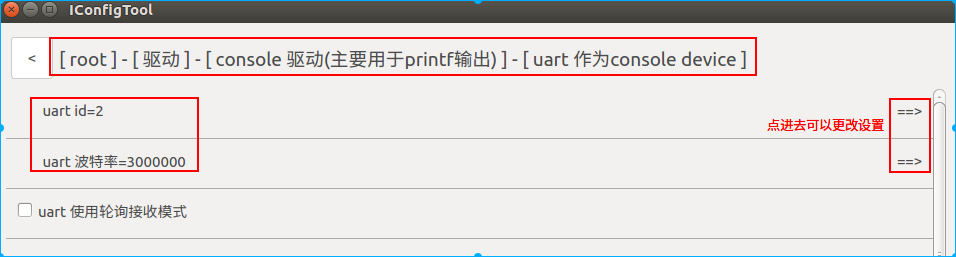
3.1 配置串口log终端
根据硬件设计,本开发板UART2(PD12, 13)作为printf 输出系统log信息口,具体配置如下:
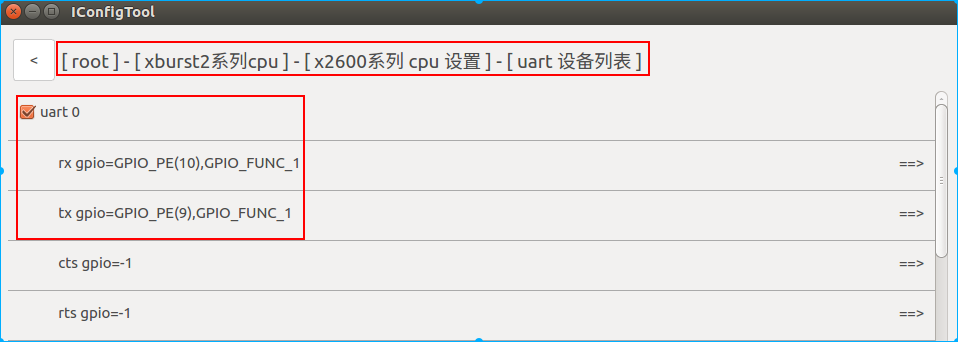
3.2 配置uart口通讯
根据硬件设计,UART0 PE09、PE10可以短接起来,自收自发数据来测试软硬件的uart通讯配置如下:
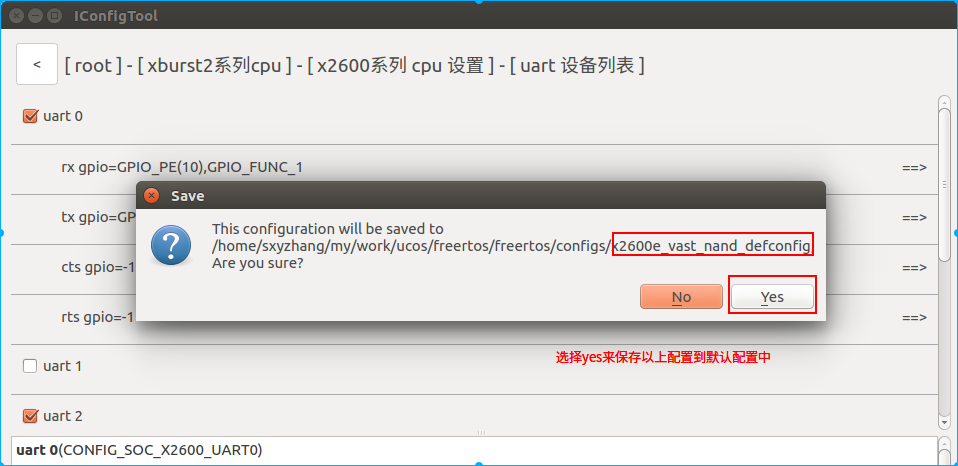
3.3 保存配置
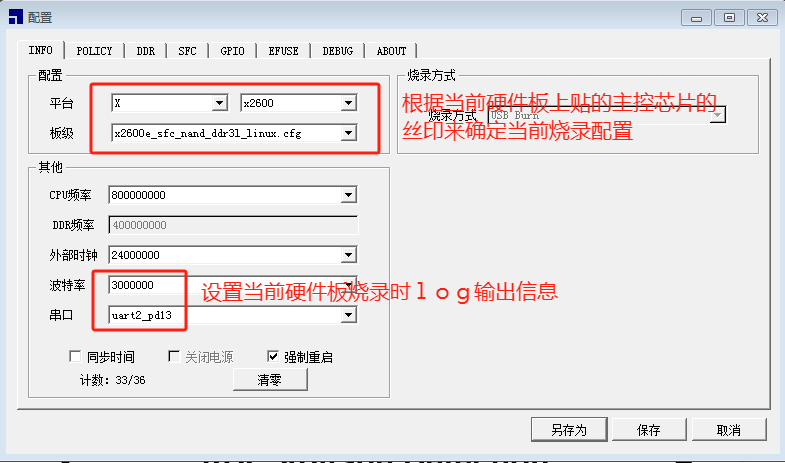
四 测试
作为log输出口的测试就直接看串口工具的输出就可以了,特别注意要将波特率设置为一致的,通讯模式比如8N1等设置成一致的。 此处不再赘述。对于自收自发的uart0的测试如下:
4.1 编写测试程序
君正提供的串口自收自发的测试程序来测试uart0, 硬件上需要将uart0的TX和RX短接。
测试程序位置:example/driver/uart_example.c
#include <stdio.h>
#include <malloc.h>
#include <driver/uart.h>
#include <os.h>
#include <string.h>
char *tx_buffer = NULL;
char *rx_buffer = NULL;
int buffer_len = 1024;
unsigned char base = 128;
static struct uart_config uart0_config = {
.uart_id = 0, // 对应uart0
.data_bits = 8,
.stop_bits = 1,
.loop_mode = 0,
.tx_poll_mode = 1,
.rx_poll_mode = 0,
// .rx_dma_mode = 1, // 对应打开rx dma 模式
// .rxdma_bufsize = 1024, //设置rx dma模式的bufsize, must >= 256
.parity = UART_PARITY_NONE,
.follow_contrl = UART_FC_NONE, //UART_FC_NONE / UART_FC_CTS_RTS
.baud_rate = 9600, // 设置待测试uart的通讯波特率
};
static void dump_buffer(void *buffer, int count)
{
int i = 0;
unsigned char *tmp = (unsigned char *)buffer;
for (i=0; i<count; i++) {
if ( (i != 0) && (i%16 == 0)) {
printf("\n");
}
printf("%02x:", tmp[i]);
}
printf("\n");
}
// uart 读取数据并比对发送buffer,全部一致没有打印,有不一致才会dump收发buffer中的数据
static void uart_read_thread_func(void *data)
{
while(1)
{
uart_receive(&uart0_config, rx_buffer, buffer_len);
if (memcmp(tx_buffer, rx_buffer, buffer_len) == 0) {
} else {
printf("uart test failed. Send != Recv\n");
printf("Send Buffer:\n");
dump_buffer(tx_buffer, buffer_len);
printf("Recv Buffer:\n");
dump_buffer(rx_buffer, buffer_len);
}
printf("\n");
}
}
// uart发送函数,发送内容每次都有改变
static void uart_write_thread_func(void *data)
{
while(1){
memset(rx_buffer, 0x00, buffer_len);
memset(tx_buffer, --base, buffer_len);
printf("Send Buffer finish =0x%x\n", tx_buffer[0]);
uart_send(&uart0_config, tx_buffer, buffer_len);
if(base == 0)
base = 128;
msleep(1000);
}
}
// 串口通讯的入口函数,前提条件是RX、TX已经短接了
void uart_test(void)
{
thread_ptr_t uart_read_t;
thread_ptr_t uart_write_t;
printf("UART Configurate Infomation:\n");
printf("UART%d: %d:%d-%c-%d\n",
uart0_config.uart_id,
uart0_config.baud_rate,
uart0_config.data_bits,
(uart0_config.parity == UART_PARITY_NONE) ? 'N' : (uart0_config.parity == UART_PARITY_ODD) ? 'O' : 'E',
uart0_config.stop_bits);
printf("HardwareFlow: %s\n", uart0_config.follow_contrl == UART_FC_NONE ? "No" : "Yes");
tx_buffer = malloc(buffer_len);
if (!tx_buffer) {
printf("uart thread malloc tx buffer failed\n");
return;
}
rx_buffer = malloc(buffer_len);
if (!rx_buffer) {
printf("uart thread malloc rx_buffer buffer failed\n");
free(tx_buffer);
return;
}
uart_start(&uart0_config);
memset(rx_buffer, 0x00, buffer_len);
memset(tx_buffer, base, buffer_len);
uart_read_t = thread_create("uart_read_test", 2048, uart_read_thread_func, NULL);
uart_write_t = thread_create("uart_write_test", 2048, uart_write_thread_func, NULL);
thread_join(uart_read_t, NULL);
thread_join(uart_write_t, NULL);
free(rx_buffer);
free(tx_buffer);
uart_stop(&uart0_config);
}
4.2 测试程序编译和使用
修改 vendor/vendor.c ,引⽤⽂件: example/driver/can_example.c
#include <stdio.h>
#include "../example/driver/uart_example.c" // 引用测试程序使编译进来
void vendor_init(void)
{
printf("vendor init...\n");
uart_test(); // 调用测试入口函数
}
4.3 测试结果
[0.000000] xburst2 rtos @ Oct 16 2023 18:40:14, epc: fffff116
[0.000085] gpio: VDDIO_CIM(PA00~PA11) = 1.8V
[0.047790] gpio: VDDIO_SD(PD00~PD05) = 3.3V
[0.096927] Supported Nand Flash, FS35SQA001G(cd:71)
[0.218071] stmmac - user ID: 0x20, Synopsys ID: 0x37
[0.273210] Ring mode enabled
[0.305451] DMA HW capability register supported Enhanced/Alternate descriptors
[0.389690] Enabled extended descriptors
[0.433371] RX Checksum Offload Engine supported (type 2)
[0.494730] TX Checksum insertion supported
[0.541530] Enable RX Mitigation via HW Watchdog Timer
[0.701772] Found mac phy id 0x0000ffff
[10.743881] stmmac_hw_setup: DMA engine initialization failed
[10.808378] stmmac_open: Hw setup failed
[10.852338] stmmac_open fail -16
[10.887432] netifapi_netif_add fail
[
1$0 .926110] vendor init...
[10.959178] UART Configurate Infomation:
[11.002858] UART0: 9600:8-N-1 // 当前uart0的配置信息
[11.035098] HardwareFlow: No // 当前uart0的流控信息,与硬件连接对应
[11.066318] Send Buffer finish =0x7f
[12.170778] //收发比对不一致的话会打印收发的buffer,一致时仅换行
[13.171319] Send Buffer finish =0x7e
[14.274771]
[15.275310] Send Buffer finish =0x7d
[16.378763]
[17.379302] Send Buffer finish =0x7c
五 编译烧录
sxyzhang@T430:~/freertos/freertos$ source build/envsetup.sh // 每次打开终端只需配置一次
sxyzhang@T430:~/freertos/freertos$ make x2600e_vast_nand_defconfig
sxyzhang@T430:~/freertos/freertos$ make

六 接口详解
1.uart_start //初始化控制器,并设置接收缓存
2.uart_send, uart_receive, uart_get_char //函数进行传输。
3.uart_stop //关闭控制器并清除接收缓存
例子代码在example/driver/uart_example.c
6.1 包含头文件
#include <uart.h>
6.2 中间参数详解 中间参数详解
uart配置结构体
struct uart_config {
unsigned char uart_id; // uart总线编号
unsigned char data_bits; // 一帧的数据位数
unsigned char stop_bits; // 停止位数
unsigned char loop_mode; // 循环模式设置(用于测试)
unsigned char rx_poll_mode; // 接收方式:1为轮询机制 0为中断方式
unsigned char tx_poll_mode; // 发送方式:1为轮询机制 0为中断方式
enum uart_parity parity; // 设置uart奇偶校验
enum uart_follow_contrl follow_contrl; // 设置流控
unsigned int baud_rate; // 设置波特率
};
uart设置奇偶枚举
enum uart_parity {
UART_PARITY_NONE, //没有奇偶校验
UART_PARITY_ODD, //奇校验
UART_PARITY_EVEN, //偶校验
};
uart设置流控枚举
enum uart_follow_contrl {
UART_FC_NONE, //关闭流控
UART_FC_CTS_RTS, //控制流选择RTS/CTS
};
6.3 接口分析
void uart_start(struct uart_config *config)
功能:初始化uart控制器,设置引脚功能映射,设置接受缓存
参数:struct uart_config *config // uart配置结构体
void uart_stop(struct uart_config *config)
功能:关闭uart控制器(关闭时钟和释放中断等操作)
参数:struct uart_config *config // uart配置结构体
void uart_send(struct uart_config *config, const char *buf, unsigned int len)
功能:uart发送数据
参数:
struct uart_config *config // uart配置结构体
const char *buf // 待发送的数据
unsigned int len // 发送数据的长度
void uart_receive(struct uart_config *config, char *buf, unsigned int len)
功能:uart接收数据
参数:
struct uart_config *config // uart配置结构体
const char *buf // 接收数据缓冲区
unsigned int len // 需要接受数据的长度
char uart_get_char(struct uart_config *config)
功能:uart接收一个字符
参数:struct uart_config *config // uart配置结构体
返回值:获取到的字符
线程安全并可在中断上下文使用:
uart_start
uart_stop (注意:调用数据传输过程,停止uart会系统异常)
如果初始化为中断工作模式,函数线程安全。不允许在中断上下文使用。
如果初始化为轮询工作模式,函数非线程安全,需要用户自己保证不能同时调用函数。可以在中断上下文使用。
uart_send
uart_receive
uart_get_char
七 调试说明
7.1 使用轮询方式实现uart通讯
修改:example/driver/uart_example.c 中的uart0_config结构体成员tx_poll_mode,rx_poll_mode为1即为轮询模式。
static struct uart_config uart0_config = {
.uart_id = 0, // 对应uart0
.data_bits = 8,
.stop_bits = 1,
.loop_mode = 0,
.tx_poll_mode = 1,
.rx_poll_mode = 1,
.parity = UART_PARITY_NONE,
.follow_contrl = UART_FC_NONE, //UART_FC_NONE / UART_FC_CTS_RTS
.baud_rate = 9600, // 设置待测试uart的通讯波特率
};
7.2 使用dma方式实现uart通讯
修改:example/driver/uart_example.c 中的uart0_config结构体成员rx_dma_mode = 1,rxdma_bufsize>=256即为dma模式。
static struct uart_config uart0_config = {
.uart_id = 0, // 对应uart0
.data_bits = 8,
.stop_bits = 1,
.loop_mode = 0,
.rx_dma_mode = 1, // 对应打开rx dma 模式
.rxdma_bufsize = 1024, //设置rx dma模式的bufsize, must >= 256
.parity = UART_PARITY_NONE,
.follow_contrl = UART_FC_NONE, // UART_FC_NONE / UART_FC_CTS_RTS
.baud_rate = 9600, // 设置待测试uart的通讯波特率
};
7.3 修改uart通讯的流控设置
如果硬件上有接流控的CTS和RTS,并且需要驱动做硬件流控,需设置example/driver/uart_example.c 中的uart0_config结构体成员follow_contrl = UART_FC_CTS_RTS。
static struct uart_config uart0_config = {
.uart_id = 0, // 对应uart0
.data_bits = 8,
.stop_bits = 1,
.loop_mode = 0,
.rx_dma_mode = 1, // 对应打开rx dma 模式
.rxdma_bufsize = 1024, //设置rx dma模式的bufsize, must >= 256
.parity = UART_PARITY_NONE,
.follow_contrl = UART_FC_NONE, // UART_FC_NONE / UART_FC_CTS_RTS
.baud_rate = 9600, // 设置待测试uart的通讯波特率
};