X2600 Camera
一 硬件环境
该文档使用的开发板为:PD_X2600E_VAST_V2.0 芯片为X2600E。camera使用的是 dvp sensor sc031。
二 Camera 功能简介
Camera 控制器
- 支持 DVP 8bit 输入
- 支持输入数据格式:RGB888, RGB565, YCbCr 4:2:2, ITU656, RAW
- 最大分辨率:2047x2047
- 实际可达最大分辨率: 640x480@60fps
三 工程配置
RTOS使用的配置文件为:x2600e_vast_nand_defconfig
使用 IConfigTool 工具打开配置。
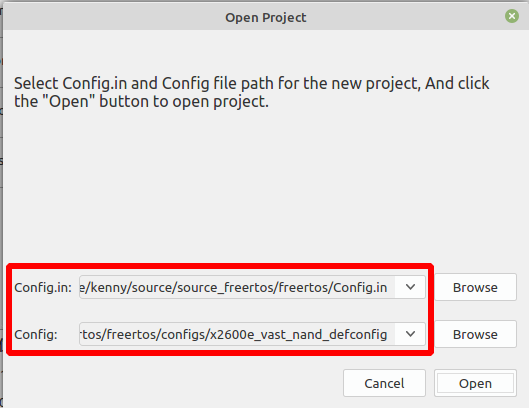
主配置选择:x2600e_vast_nand_defconfig

摄像头选择 sc031 ,相关的gpio 引脚根据自己的硬件原理图进行配置。

选择 camera 驱动(cim控制器)
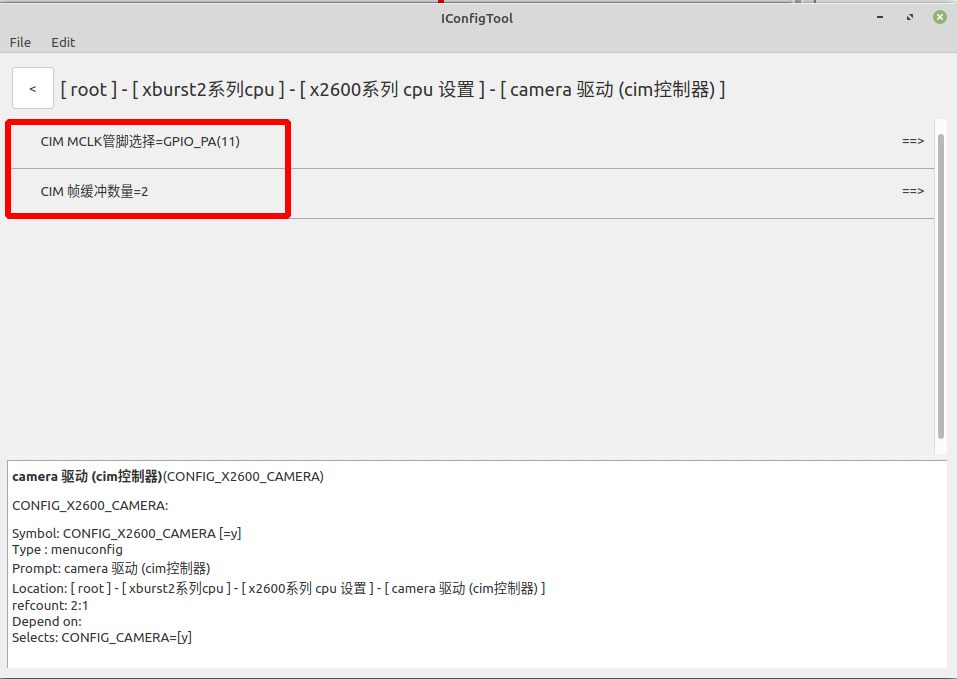
选择 camera 驱动(cim控制器)的 CIM MCLK管脚和缓冲数量,具体参考硬件设计原理图

选择I2C总线,总线号跟 sensor sc031 驱动中的i2c bus num 相对应。

勾选adc(电压采样)
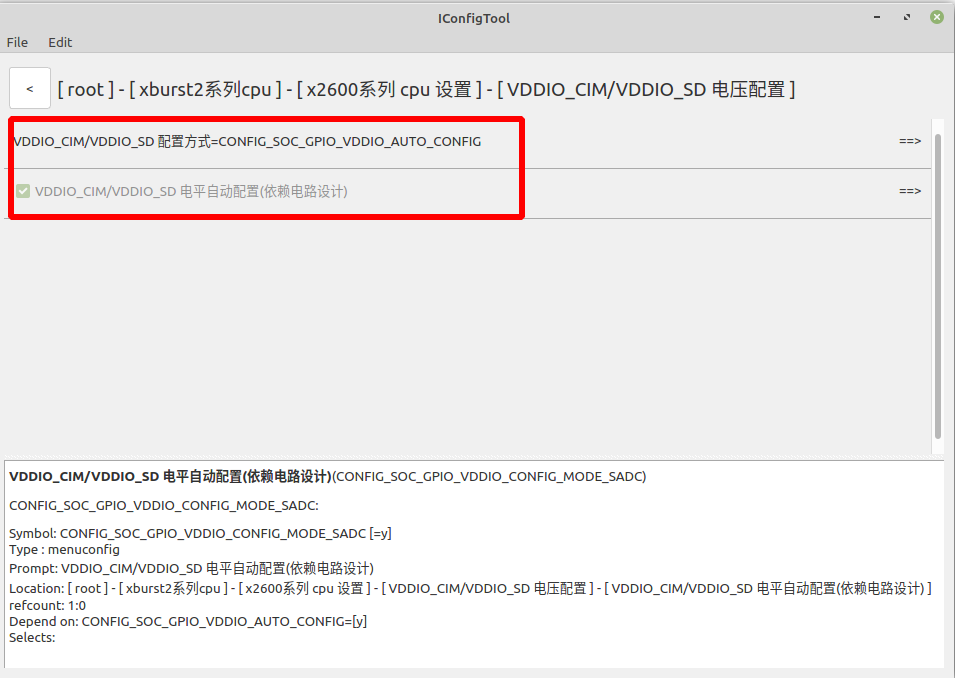
VDDIO_CIM/VDDIO_SD 配置方式选择自动 CONFIG_SOC_GPIO_VDDIO_AUTO_CONFIG,进入CONFIG_SOC_GPIO_VDDIO_AUTO_CONFIG选项如下:

选择根据 SADC自动配置

点击VDDIO_CIM/VDDIO_SD 电平自动配置(��依赖电路设计)选项进入配置界面
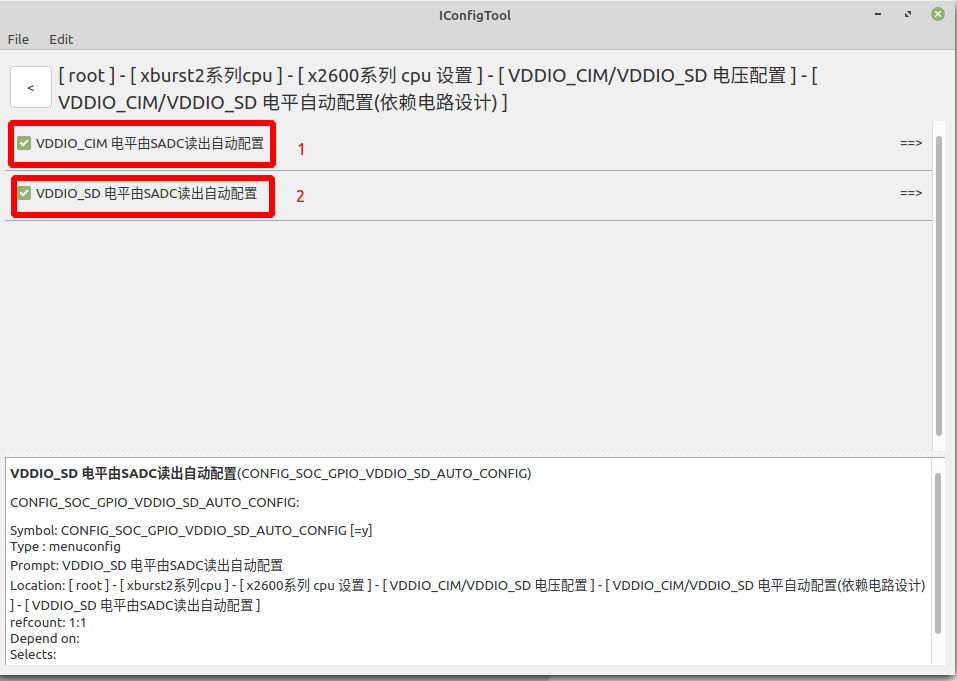
点击上图 VDDIO_CIM 电平由SADC读出自动配置选项,进入 VDDIO_CIM 电平自动配置的电路界面,如下所示:
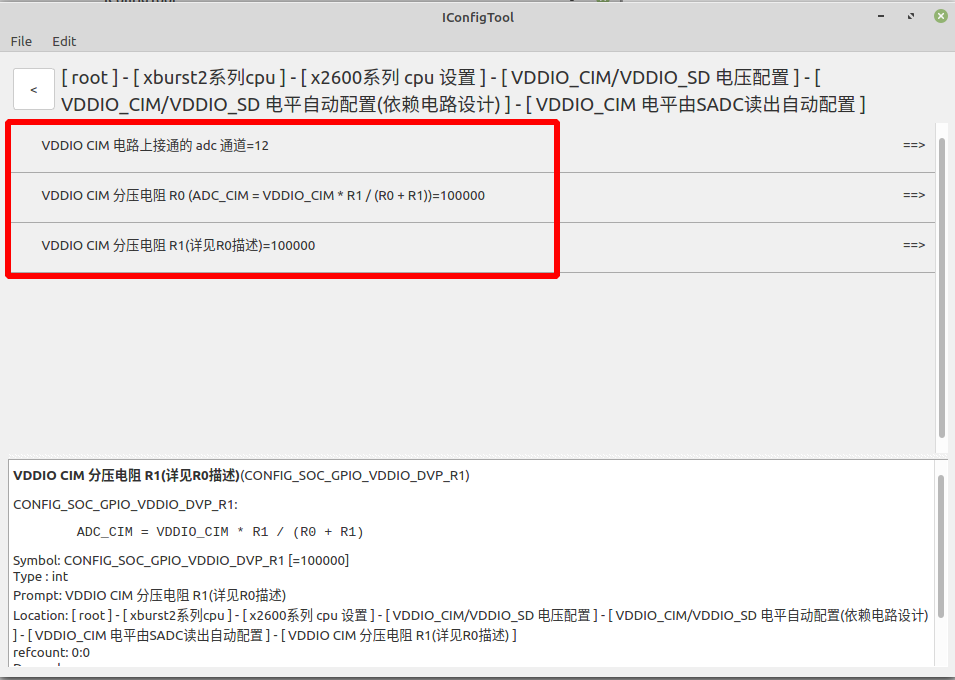
VDDIO CIM 电路上接通的 adc 通道选择 AUX12
VDDIO CIM 分压电阻 R0 (ADC_CIM = VDDIO_CIM * R1 / (R0 + R1)) 为100000 (100k Ω )
VDDIO CIM 分压电阻 R1(详见R0描述) 为 100000 (100k Ω)
点击上图 VDDIO_SD 电平由SADC读出自动配置选项,进入 VDDIO_SD 电平自动配置的电路界面,如下所示:
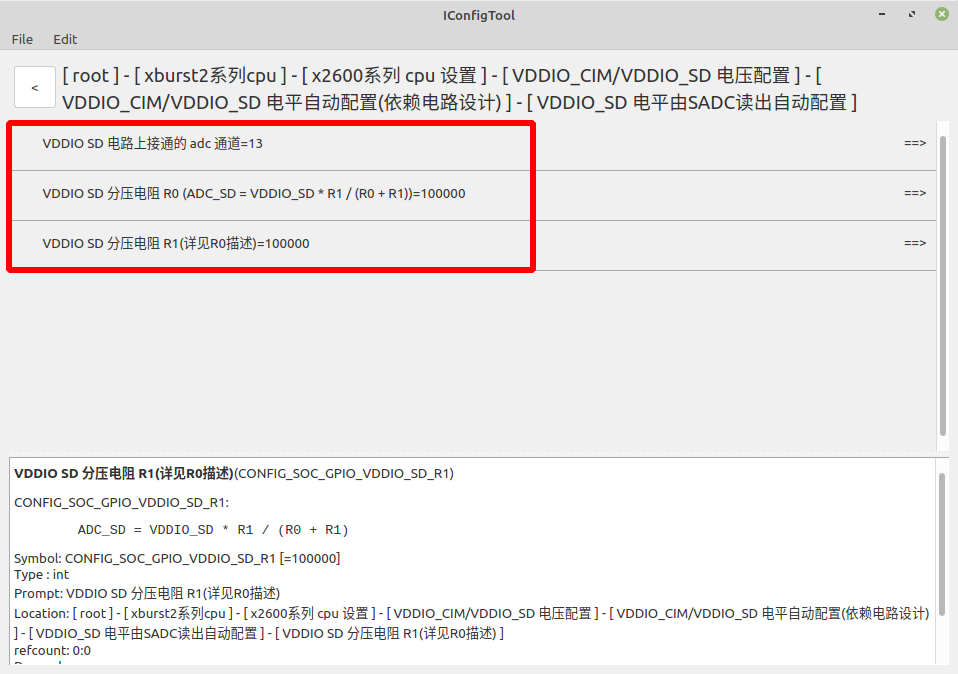
VDDIO SD 电路上接通的 adc 通道选择 AUX13
VDDIO SD 分压电阻 R0 (ADC_SD = VDDIO_SD * R1 / (R0 + R1)) 为100000 (100k Ω)
VDDIO SD 分压电阻 R1(详见R0描述) 为 100000 (100k Ω)
四 测试
由于 camera sc031 的是黑白的 Y8格,所以不支持本地预览。可以采用本地采集camera数据和电脑端uvc预览两种方式。
4.1 采集camera数据输出的方式
修改 vendor/vendor.c ,引用文件: example/driver/camera_example.c
vendor.c文件内容如下:
#include <stdio.h>
#include <../example/driver/camera_example.c>
void vendor_init(void)
{
test_camera(0);//参数为0,是因为 x2600e 只有CIM,而CIM只能接一路camera,所以填0
printf("vendor init...\n");
}
4.1.1 camera_example.c 文件
example/driver/camera_example.c 文件内容如下:
#include <stdio.h>
#include <os.h>
#include <driver/camera.h>
#include <common.h>
//x2600只有一个CIM,所以参数填写为0
void test_camera(int index)
{
struct camera_device *camera;
struct camera_info *info;
int ret;
camera = camera_detect(index);
if (!camera) {
printf("camera not found\n");
return;
}
info = camera_get_info(camera);
assert(info);
printf("camera found %s (%dx%d)\n", info->name, info->width, info->height);
ret = camera_power_on(camera);
if (ret < 0) {
printf("camera failed to power on\n");
return;
}
ret = camera_stream_on(camera);
if (ret < 0) {
printf("camera failed to stream on\n");
camera_power_off(camera);
return;
}
int retry_count = 0;
while (1) {
void *buf = camera_wait_frame(camera);
if (buf == NULL) {
camera_frame_error_type err = camera_get_frame_error(camera);
printf("camera failed to get frame:%d\n", err);
if (retry_count++ == 1) {
printf("camera reset failed\n");
camera_power_off(camera);
return;
}
if (err == camera_error_dma_error) {
camera_stream_off(camera);
camera_stream_on(camera);
} else {
camera_power_off(camera);
camera_power_on(camera);
camera_stream_on(camera);
}
continue;
}
retry_count = 0;
if (camera_fmt_is_NV12(info->data_fmt)) {
printf("camera: frame:%p uv_buffer: %p\n", buf, buf + info->uv_data_offset);
} else {
printf("uv_buffer: %p\n", buf);
}
camera_put_frame(camera, buf);
}
}
编译和烧录固件。然后开机,查看串口打印如下:
运行后串口信息如下:
[0.000000] xburst2 rtos @ Sep 20 2023 16:29:38, epc: 8002d248
[0.000072] gpio: VDDIO_CIM(PA00~PA11) = 1.8V
[0.000230] gpio: VDDIO_SD(PD00~PD05) = 3.3V
[0.002731] Supported Nand Flash, ATO25D1GA(9b:12)
[0.039437] stmmac - user ID: 0x20, Synopsys ID: 0x37
[0.039619] Ring mode enabled
[0.039723] DMA HW capability register supported Enhanced/Alternate descriptors
[0.039992] Enabled extended descriptors
[0.040133] RX Checksum Offload Engine supported (type 2)
[0.040329] TX Checksum insertion supported
[0.040480] Enable RX Mitigation via HW Watchdog Timer
[0.142397] Found mac phy id 0x02430c54
[0.217682] sc031 get chip id = 0031
[0.235215] camera found sc031-dvp (640x480) //识别到camera sc031
[0.267924] uv_buffer: 80850780
[0.276250] uv_buffer: 8089b780
[0.284579] uv_buffer: 808e6780
[0.292908] uv_buffer: 80850780
[0.301237] uv_buffer: 8089b780
[0.309565] uv_buffer: 808e6780
[0.317894] uv_buffer: 80850780
[0.326223] uv_buffer: 8089b780
[0.334552] uv_buffer: 808e6780
[0.342881] uv_buffer: 80850780
[0.351209] uv_buffer: 8089b780
[0.359538] uv_buffer: 808e6780
[0.367867] uv_buffer: 80850780
[0.376196] uv_buffer: 8089b780
[0.384525] uv_buffer: 808e6780
[0.392853] uv_buffer: 80850780
4.1.2 camera.h 头文件介绍
freertos$ ls ./include/driver/camera.h
#ifndef _CAMERA_H_
#define _CAMERA_H_
#include <driver/camera_pixel_format.h>
typedef enum {
/*当前并未出错
*/
camera_error_null,
/* 等待帧数据时camera_stream_off被调用
*/
camera_error_stream_is_off,
/* 帧传输时dma出错,可能导致帧数据错位
*/
camera_error_dma_error,
/* 帧接收超时,其它原因导致
*/
camera_error_timeout,
} camera_frame_error_type;
struct camera_info {
char name[64];
/* 每行像素数 */
unsigned int width;
/* 行数 */
unsigned int height;
/* camera 帧率 */
unsigned int fps;
/* camera 帧数据格式 */
camera_pixel_fmt data_fmt;
/* 一行的长度,单位字节
* 对于 nv12,nv21, 表示y数据一行的长度
* 另外由此可以算出uv数据偏移 line_length*height
*/
unsigned int line_length;
/* 一帧数据经过对齐之前的大小 */
unsigned int frame_size;
/* 帧缓冲总数 */
unsigned int frame_nums;
/* 帧缓冲的物理基地址 */
unsigned long phys_mem;
/* mmap 后的帧缓冲基地址 */
void *mapped_mem;
/*帧对齐大小 */
unsigned int frame_align_size;
/* 上面的结构体成员与 Linux 一致,下面的成员仅 RTOS 所有*/
/* 诸如 NV12 等 planner 格式下, UV 数据在一帧中的偏移 */
unsigned int uv_data_offset;
};
/* 图像帧信息 */
struct frame_info {
unsigned int index; /* 缓存编号 */
unsigned int sequence; /* 帧序列号 */
unsigned int width; /* 帧宽 */
unsigned int height; /* 帧高 */
unsigned int pixfmt; /* 帧的图像格式 */
unsigned int size; /* 帧所占用空间大小 */
void *vaddr; /* 帧的虚拟地址 */
unsigned long paddr; /* 帧的物理地址 */
unsigned long long timestamp; /* 帧的时间戳,单位微秒,单调时间 */
unsigned int isp_timestamp; /* isp时间戳,在vic通过isp clk计数换算得出,单位微秒,
最大值10000秒左右(最大值和isp clk相关),大于最大值重新清零计时 */
unsigned int shutter_count; /* 曝光计数 */
};
struct sensor_dbg_register {
unsigned long long reg;
unsigned long long val;
unsigned int size; /* val size, unit:byte */
};
struct camera_device;
/**
* @brief camera 驱动初始化
*/
void camera_init(void);
/**
* @brief 探测第一个可用的 camera
* @param index 选择控制器(仅X2000有效)
* @return 非NULL : 成功 NULL: 失败, 一般是i2c 通信失败或者没有sensor注册
*/
struct camera_device *camera_detect(int index);
/**
* @brief 或者camera 信息
* @param camera 由 camera_detect() 返回的指针
* @return camera 信息
*/
struct camera_info *camera_get_info(struct camera_device *camera);
/**
* @brief 打开 camera 电源
* @param camera 由 camera_detect() 返回的指针
* @return 0 : 成功 < 0: 失败, 一般是i2c 通信失败
*/
int camera_power_on(struct camera_device *camera);
/**
* @brief 关闭 camera 电源
* @param camera 由 camera_detect() 返回的指针
*/
void camera_power_off(struct camera_device *camera)
/**
* @brief 打开 camera 图像输出
* @param camera 由 camera_detect() 返回的指针
* @return 0 : 成功 < 0: 失败, 一般是i2c 通信失败
*/
int camera_stream_on(struct camera_device *camera);
/**
* @brief 关闭 camera 图像输出
* @param camera 由 camera_detect() 返回的指针
*/
void camera_stream_off(struct camera_device *camera);
/**
* @brief 等待可用的帧
* @param camera 由 camera_detect() 返回的指针
* @return 非NULL: 帧的首地址 NULL: 表示失败,失败原因由camera_get_frame_error()得到
*/
void *camera_wait_frame(struct camera_device *camera);
/**
* @brief 获取camera 帧错误原因
* @param camera 由 camera_detect() 返回的指针
* @return camera 帧错误原因
* camera_error_null 表示没有错误,其它表示出错 @see camera_frame_error_type
*/
camera_frame_error_type camera_get_frame_error(struct camera_device *camera);
/**
* @brief 等待可用的帧
* @param camera 由 camera_detect() 返回的指针
* @param frame 由 camera_wait_frame() 返回的指针
*/
void camera_put_frame(struct camera_device *camera, void *frame);
/**
* @brief 获取一帧录制的图像数据
* @param camera 由 camera_detect() 返回的指针
*/
void *camera_get_frame(struct camera_device *camera);
/**
* @brief 等待可用的帧
* @param camera 由 camera_detect() 返回的指针
* @param frame 由 camera_wait_frame() 返回的指针
*/
int camera_dqbuf(struct camera_device *camera, struct frame_info *frame);
/**
* @brief 等待可用的帧
* @param camera 由 camera_detect() 返回的指针
* @param frame 由 camera_wait_frame() 返回的指针
*/
int camera_dqbuf_wait(struct camera_device *camera, struct frame_info *frame);
/**
* @brief 等待可用的帧
* @param camera 由 camera_detect() 返回的指针
* @param frame 由 camera_wait_frame() 返回的指针
*/
int camera_qbuf(struct camera_device *camera, struct frame_info *frame);
/**
* @brief 获取sensor寄存器
* @param camera 由 camera_detect() 返回的指针
* @return 成功返回0,失败返回负数
*/
int camera_get_sensor_reg(struct camera_device *camera, struct sensor_dbg_register *reg);
/**
* @brief 设置sensor寄存器
* @param camera 由 camera_detect() 返回的指针
* @return 成功返回0,失败返回负数
*/
int camera_set_sensor_reg(struct camera_device *camera, struct sensor_dbg_register *reg);
/**
* @brief 获取可用的帧数 (最大值由驱动frame buffer数量决定)
* @param camera 由 camera_detect() 返回的指针
* @return 可用的帧数
*/
unsigned int camera_get_available_frame_count(struct camera_device *camera);
/**
* @brief 跳过指定的可用帧,这样camera_wait_frame() 能拿到较新的帧
* @param camera 由 camera_detect() 返回的指针
*/
void camera_skip_frames(struct camera_device *camera, unsigned int frames);
/**
* @brief 设置统计luminance区域(设置坐标). 目前仅X1600支持该功能
* @param camera 由 camera_detect() 返回的指针
* @param lumi_enable 使能/禁止统计区域luminance值功能
* @param (x1, y1) 划分区域luminance第一个点坐标
* @param (x2, y2) 划分区域luminance第二个点坐标
* @return 是否支持该功能 < 0 设置区域失败/不支持统计luminance功能
* = 0 设置区域成功
*
* x1 x2
* |--------|--------|--------|
* | area0 | area1 | area2 |
* y1 |--------|--------|--------|
* | area3 | area4 | area5 |
* y2 |--------|--------|--------|
* | area6 | area7 | area8 |
* |--------|--------|--------|
*/
int camera_set_luminance_area(struct camera_device *camera, int lumi_enable, int x1, int y1, int x2, int y2);
/**
* @brief 获取区域luminance区域总和值. 目前仅X1600支持该功能
* @param camera 由 camera_detect() 返回的指针
* @param frame 由 camera_wait_frame() 返回的指针
* @param lumi 各区域内luminance的总和
* @return 统计区域占内存大小
* > 0, luminance统计值占用内存大小
* = 0, 禁止/不支持luminance统计功能
*/
int camera_get_luminance_area_total(struct camera_device *camera, void *frame, void *lumi);
#endif /* _CAMERA_H_ */
4.2 uvc预览的输出方式
4.2.1 修改usb配置

勾选usb驱动

选择 USB0(支持OTG)驱动

1: USB0驱动模式选择 CONFIG_USB_PERIPHERAL
2:选择USB0设备模式下模拟的设备为:CONFIG_USB_GADGET_UVC
3:勾选关闭USB0的VBUS检测功能
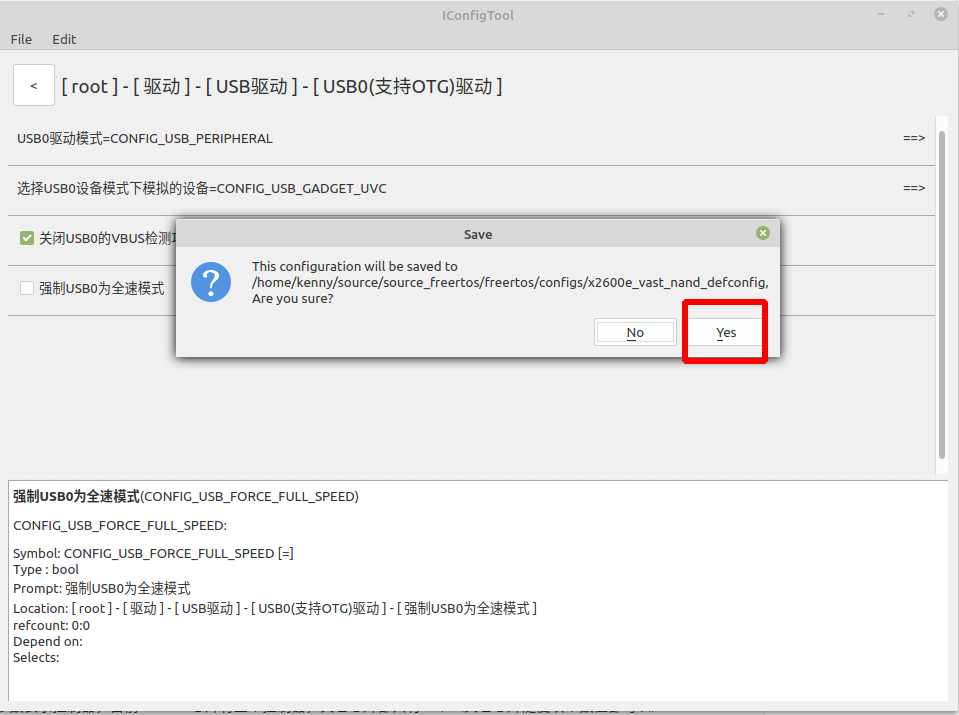
修改后保存配置 x2600e_vast_nand_defconfig
4.2.2 修改vendor.c文件
修改 vendor/vendor.c ,引用文件: example/usb/device/gadget_usb_uvc_with_camera.c
#include <stdio.h>
#include <../example/usb/device/gadget_usb_uvc_with_camera.c>
void vendor_init(void)
{
gadget_usb_uvc_with_camera(0); //参数为0,是因为 x2600e 只有CIM,而CIM只能接一路camera,所以填0
printf("vendor init...\n");
}
编译和烧录固件以后,插上电脑,使用guvcview软件进行预览即可。
example/usb/device/gadget_usb_uvc_with_camera.c 文件内容如下:
#include <common.h>
#include <os.h>
#include <usb/gadget_uvc.h>
#include <stdio.h>
#include <os.h>
#include <driver/camera.h>
#include <common.h>
#include <driver/cache.h>
#define WEBCAM_VENDOR_ID 0x1d6b /* Linux Foundation */
#define WEBCAM_PRODUCT_ID 0x0102 /* Webcam A/V gadget */
static struct gadget_id usb_id = {
.vendor_id = WEBCAM_VENDOR_ID,
.product_id = WEBCAM_PRODUCT_ID,
};
static const unsigned int frame_fps[] = {
20,
};
static struct uvc_frame_config uvc_frames[] = {
{
// .width = 1280,
// .height = 720,
.fps_num = ARRAY_SIZE(frame_fps),
.frame_fps = frame_fps,
},
};
static struct uvc_format_config uvc_frame_format[]= {
{
.fcc = V4L2_PIX_FMT_YUYV, // V4L2_PIX_FMT_GREY
.bpp = 16, // 8
.frames_num = ARRAY_SIZE(uvc_frames),
.frames = uvc_frames,
},
};
static struct uvc_device_config uvc_config = {
.format_num = ARRAY_SIZE(uvc_frame_format),
.formats = uvc_frame_format,
};
void bayer16_to_yuyv(void *_dst, void *_src, int xres, int yres)
{
int len = xres * yres;
unsigned char *src = _src + 1;
unsigned char *dst = _dst;
int i = len / 16;
while (i--) {
unsigned char s0 = src[0*2];
unsigned char s1 = src[1*2];
unsigned char s2 = src[2*2];
unsigned char s3 = src[3*2];
unsigned char s4 = src[4*2];
unsigned char s5 = src[5*2];
unsigned char s6 = src[6*2];
unsigned char s7 = src[7*2];
unsigned char s8 = src[8*2];
unsigned char s9 = src[9*2];
unsigned char s10 = src[10*2];
unsigned char s11 = src[11*2];
unsigned char s12 = src[12*2];
unsigned char s13 = src[13*2];
unsigned char s14 = src[14*2];
unsigned char s15 = src[15*2];
dst[0*2] = s0;
dst[0*2+1] = 0x80;
dst[1*2] = s1;
dst[1*2+1] = 0x80;
dst[2*2] = s2;
dst[2*2+1] = 0x80;
dst[3*2] = s3;
dst[3*2+1] = 0x80;
dst[4*2] = s4;
dst[4*2+1] = 0x80;
dst[5*2] = s5;
dst[5*2+1] = 0x80;
dst[6*2] = s6;
dst[6*2+1] = 0x80;
dst[7*2] = s7;
dst[7*2+1] = 0x80;
dst[8*2] = s8;
dst[8*2+1] = 0x80;
dst[9*2] = s9;
dst[9*2+1] = 0x80;
dst[10*2] = s10;
dst[10*2+1] = 0x80;
dst[11*2] = s11;
dst[11*2+1] = 0x80;
dst[12*2] = s12;
dst[12*2+1] = 0x80;
dst[13*2] = s13;
dst[13*2+1] = 0x80;
dst[14*2] = s14;
dst[14*2+1] = 0x80;
dst[15*2] = s15;
dst[15*2+1] = 0x80;
src += 32;
dst += 32;
}
}
void bayer16_to_bayer8(void *_dst, void *_src, int xres, int yres)
{
int len = xres * yres;
unsigned char *src = _src + 1;
unsigned char *dst = _dst;
int i = len / 16;
while (i--) {
unsigned char s0 = src[0*2];
unsigned char s1 = src[1*2];
unsigned char s2 = src[2*2];
unsigned char s3 = src[3*2];
unsigned char s4 = src[4*2];
unsigned char s5 = src[5*2];
unsigned char s6 = src[6*2];
unsigned char s7 = src[7*2];
unsigned char s8 = src[8*2];
unsigned char s9 = src[9*2];
unsigned char s10 = src[10*2];
unsigned char s11 = src[11*2];
unsigned char s12 = src[12*2];
unsigned char s13 = src[13*2];
unsigned char s14 = src[14*2];
unsigned char s15 = src[15*2];
dst[0] = s0;
dst[1] = s1;
dst[2] = s2;
dst[3] = s3;
dst[4] = s4;
dst[5] = s5;
dst[6] = s6;
dst[7] = s7;
dst[8] = s8;
dst[9] = s9;
dst[10] = s10;
dst[11] = s11;
dst[12] = s12;
dst[13] = s13;
dst[14] = s14;
dst[15] = s15;
src += 32;
dst += 16;
}
}
void grey_to_yuyv(void *_dst, void *_src, int xres, int yres)
{
int len = xres * yres;
unsigned char *src = _src + 1;
unsigned char *dst = _dst;
int i = len / 16;
while (i--) {
unsigned char s0 = src[0];
unsigned char s1 = src[1];
unsigned char s2 = src[2];
unsigned char s3 = src[3];
unsigned char s4 = src[4];
unsigned char s5 = src[5];
unsigned char s6 = src[6];
unsigned char s7 = src[7];
unsigned char s8 = src[8];
unsigned char s9 = src[9];
unsigned char s10 = src[10];
unsigned char s11 = src[11];
unsigned char s12 = src[12];
unsigned char s13 = src[13];
unsigned char s14 = src[14];
unsigned char s15 = src[15];
dst[0 * 2 + 0] = s0;
dst[0 * 2 + 1] = 128;
dst[1 * 2 + 0] = s1;
dst[1 * 2 + 1] = 128;
dst[2 * 2 + 0] = s2;
dst[2 * 2 + 1] = 128;
dst[3 * 2 + 0] = s3;
dst[3 * 2 + 1] = 128;
dst[4 * 2 + 0] = s4;
dst[4 * 2 + 1] = 128;
dst[5 * 2 + 0] = s5;
dst[5 * 2 + 1] = 128;
dst[6 * 2 + 0] = s6;
dst[6 * 2 + 1] = 128;
dst[7 * 2 + 0] = s7;
dst[7 * 2 + 1] = 128;
dst[8 * 2 + 0] = s8;
dst[8 * 2 + 1] = 128;
dst[9 * 2 + 0] = s9;
dst[9 * 2 + 1] = 128;
dst[10 * 2 + 0] = s10;
dst[10 * 2 + 1] = 128;
dst[11 * 2 + 0] = s11;
dst[11 * 2 + 1] = 128;
dst[12 * 2 + 0] = s12;
dst[12 * 2 + 1] = 128;
dst[13 * 2 + 0] = s13;
dst[13 * 2 + 1] = 128;
dst[14 * 2 + 0] = s14;
dst[14 * 2 + 1] = 128;
dst[15 * 2 + 0] = s15;
dst[15 * 2 + 1] = 128;
src += 16;
dst += 32;
}
}
static unsigned char uvc_stream_on;
static unsigned char uvc_buf_use;
static thread_ptr_t uvc_thread;
struct camera_device *camera;
struct camera_info *camera_info;
static volatile int format_width;
static int camera_width;
static int camera_height;
static int src_is_bayer16;
static int dest_is_bayer16;
static int src_is_grey;
static int dest_is_grey;
static int dest_is_yuyv;
static void uvc_connect_callback(int connect)
{
printf("uvc_connect_callback %d\n", connect);
}
static void uvc_format_callback(const struct uvc_video_format *format)
{
char *data = (char *)&format->fcc;
format_width = format->width;
printf("uvc format: %c%c%c%c, width %d, height %d, fps %d\n", data[0], data[1], data[2], data[3], format->width, format->height, format->fps);
}
static int uvc_stream_callback(int enable)
{
printf("uvc_stream_callback %d\n", enable);
uvc_stream_on = enable;
if (enable)
thread_wakeup(uvc_thread);
return 0;
}
static void uvc_buf_complete(struct uvc_buffer *buf)
{
if (buf->state != UVC_BUF_STATE_DONE)
printf("%s: data not transmitted\n", __func__);
uvc_buf_use = 0;
thread_wakeup(uvc_thread);
}
static int camera_is_on = 0;
static int power_on_m_camera(void)
{
int ret;
if (camera_is_on)
return 0;
ret = camera_power_on(camera);
if (ret < 0) {
printf("camera failed to power on\n");
return ret;
}
ret = camera_stream_on(camera);
if (ret < 0) {
printf("camera failed to stream on\n");
camera_power_off(camera);
return ret;
}
camera_is_on = 1;
return 0;
}
static void power_off_m_camera(void)
{
if (!camera_is_on)
return;
camera_stream_off(camera);
camera_power_off(camera);
camera_is_on = 0;
}
static void usb_gadget_uvc_thread(void *data)
{
int ret;
void *mem;
struct uvc_buffer uvc_buf;
uvc_buf.complete = uvc_buf_complete;
uvc_buf.mem = NULL;
void *yuyv_mem = NULL;
if (src_is_grey && dest_is_yuyv) {
yuyv_mem = malloc(camera_width*camera_height*2);
assert(yuyv_mem);
}
while (1) {
thread_wait();
if (uvc_stream_on) {
if (power_on_m_camera())
continue;
while (uvc_stream_on)
{
while (uvc_buf_use)
thread_wait();
if (uvc_buf.mem && !yuyv_mem) {
camera_put_frame(camera, (void *)uvc_buf.mem);
uvc_buf.mem = NULL;
}
if (!uvc_stream_on)
break;
mem = camera_wait_frame(camera);
if (mem == NULL) {
camera_frame_error_type err = camera_get_frame_error(camera);
printf("failed to get frame: %d\n", err);
if (err == camera_error_dma_error) {
camera_stream_off(camera);
camera_stream_on(camera);
} else {
camera_power_off(camera);
camera_power_on(camera);
}
continue;
}
if (src_is_bayer16 && dest_is_yuyv)
bayer16_to_yuyv(mem, mem, camera_width, camera_height);
if (src_is_bayer16 && dest_is_grey)
bayer16_to_bayer8(mem, mem, camera_width, camera_height);
if (src_is_grey && dest_is_yuyv)
grey_to_yuyv(yuyv_mem, mem, camera_width, camera_height);
if (!uvc_stream_on) {
camera_put_frame(camera, mem);
break;
}
int bpp = dest_is_yuyv ? 16 : 8;
uvc_buf.mem = yuyv_mem ? yuyv_mem : mem;
uvc_buf.length = format_width * camera_height * bpp/8;
uvc_buf_use = 1;
ret = gadget_uvc_write(&uvc_buf, 0, 0);
if (ret < 0) {
uvc_buf_use = 0;
uvc_buf.mem = NULL;
camera_put_frame(camera, mem);
}
if (yuyv_mem)
camera_put_frame(camera, mem);
}
power_off_m_camera();
}
}
}
struct uvc_callback callback = {
.format_cb = uvc_format_callback,
.stream_cb = uvc_stream_callback,
.connect_cb = uvc_connect_callback,
};
int gadget_usb_uvc_with_camera(int index)
{
camera = camera_detect(index);
if (!camera) {
printf("camera not found\n");
return 0;
}
camera_info = camera_get_info(camera);
assert(camera_info);
printf("camera found %s (%dx%d) %d\n",
camera_info->name, camera_info->width, camera_info->height, camera_info->frame_align_size);
camera_width = camera_info->width;
camera_height = camera_info->height;
switch (camera_info->data_fmt) {
case CAMERA_PIX_FMT_SBGGR16:
case CAMERA_PIX_FMT_SGBRG16:
case CAMERA_PIX_FMT_SGRBG16:
case CAMERA_PIX_FMT_SRGGB16:
src_is_bayer16 = 1;
dest_is_yuyv = 1; // 或者 dest_is_grey = 1, 查看 grey 数据, 注意windows工具不能看grey
break;
case CAMERA_PIX_FMT_YUYV:
case CAMERA_PIX_FMT_YYUV:
case CAMERA_PIX_FMT_YVYU:
case CAMERA_PIX_FMT_UYVY:
case CAMERA_PIX_FMT_VYUY:
dest_is_yuyv = 1;
break;
case CAMERA_PIX_FMT_GREY:
src_is_grey = 1;
dest_is_yuyv = 1; // 或者 dest_is_grey = 1, 查看 grey 数据, 注意windows工具不能看grey
break;
default:
panic("this format currently not support: 0x%x\n", camera_info->data_fmt);
}
uvc_frames[0].width = camera_width;
uvc_frames[0].height = camera_height;
if (!dest_is_yuyv) {
uvc_frame_format[0].fcc = V4L2_PIX_FMT_GREY;
uvc_frame_format[0].bpp = 8;
} else {
uvc_frame_format[0].fcc = V4L2_PIX_FMT_YUYV;
uvc_frame_format[0].bpp = 16;
}
gadget_uvc_init(&usb_id, &uvc_config, &callback);
uvc_thread = thread_create("usb gadget uvc thread", 8192, usb_gadget_uvc_thread, NULL);
return 0;
}
4.2.3 gadget_uvc.h 头文件
freertos$ ls include/usb/gadget_uvc.h
#ifndef _GADGET_UVC_H_
#define _GADGET_UVC_H_
#include <common.h>
#include "gadget_common.h"
#include "uvc.h"
#ifdef CONFIG_USB_GADGET_UVC
#define UVC_ENTITY_INTERFACE_ID 0x00
#define UVC_ENTITY_CAMERA_TERMINAL_ID 0x01
#define UVC_ENTITY_PROCESS_UNIT_ID 0x02
#define UVC_ENTITY_OUTPUT_TERMINAL_ID 0x03
struct uvc_frame_config
{
unsigned int width;
unsigned int height;
unsigned int fps_num;
const unsigned int *frame_fps;
};
struct uvc_format_config
{
unsigned int fcc;
unsigned int bpp;
unsigned int frames_num;
const struct uvc_frame_config *frames;
};
struct uvc_device_config
{
unsigned int format_num;
unsigned int camera_feature_config;
unsigned int camera_param_config;
const struct uvc_format_config *formats;
};
struct uvc_control_request
{
void* buf;
unsigned int buf_actual;
unsigned char request;
unsigned int request_len;
unsigned char entity_id;
unsigned char control_selector;
unsigned char event_out;
};
typedef void (*format_callback_t)(const struct uvc_video_format *format);
typedef int (*stream_callback_t)(int enable);
typedef int (*fparam_callback_t)(const struct uvc_control_request *req);
struct uvc_callback
{
format_callback_t format_cb;
stream_callback_t stream_cb;
connect_callback_t connect_cb;
fparam_callback_t param_cb;
};
/*
uvc init
param:
<id> Manufacturer's device ID
<config> uvc device config
<callback> uvc function callback
return:
<normal> 0
<abnormal> Error code
*/
extern void gadget_uvc_init(const struct gadget_id *id, const struct uvc_device_config *config,
const struct uvc_callback* callback);
/* uvc device cleanup */
extern void gadget_uvc_cleanup(void);
/*
UVC write data
param:
<buf> Buffer for writing data
<block> Is it blocked
<timeout_ms> Block timeout
return:
<normal> 0
<abnormal> Error code
*/
extern int gadget_uvc_write(struct uvc_buffer *buf, uint8_t block, uint32_t timeout_ms);
/*
Get UVC Connection Status
return:
<normal> Connection Status
<abnormal> Error code
*/
extern int gadget_uvc_get_connect_status(void);
/*
Waiting for UVC link
param:
<timeout_ms> Block timeout
return:
<normal> 0
<abnormal> Error code
*/
extern int gadget_uvc_wait_connect(uint32_t timeout_ms);
/*
Waiting for UVC stream on
param:
<timeout_ms> Block timeout
<format> UVC video format
return:
<normal> 0
<abnormal> Error code
*/
extern int gadget_uvc_wait_stream(uint32_t timeout_ms, struct uvc_video_format *format);
#endif
#endif /* _GADGET_UVC_H_ */
五 工程编译和烧录
5.1 工程编译
编译命令如下:
cd freertos/
$ source build/envsetup.sh
$ make x2600e_vast_nand_defconfig
$ make
5.2 工程烧录
烧录工具配置如下:
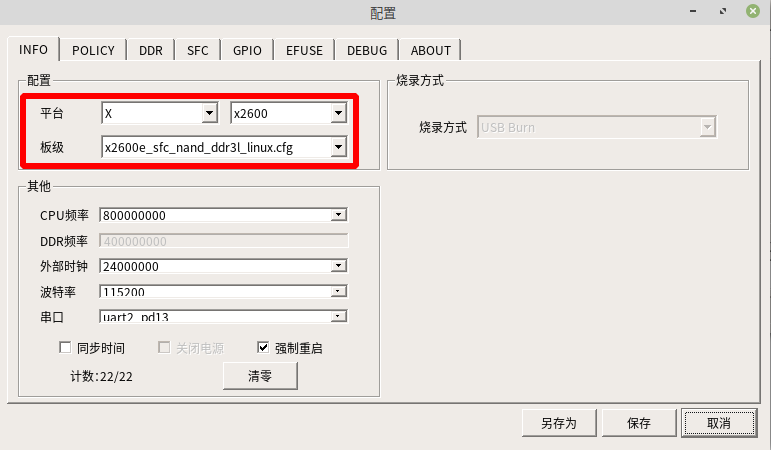
平台选择: x2600
板级选择:x2600e_sfc_nand_ddr3l_linux.cfg
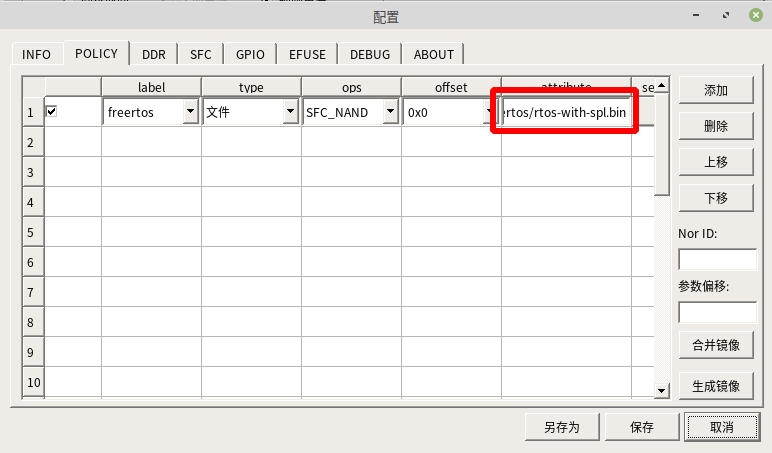
烧录的文件选择:freertos/rtos-with-spl.bin
label的名称要与 SFC 中分区信息的Partition name 一致。
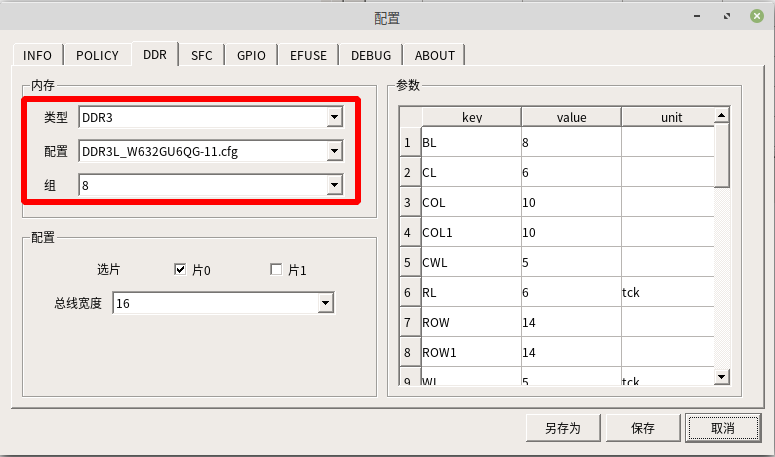
保持默认就可以。
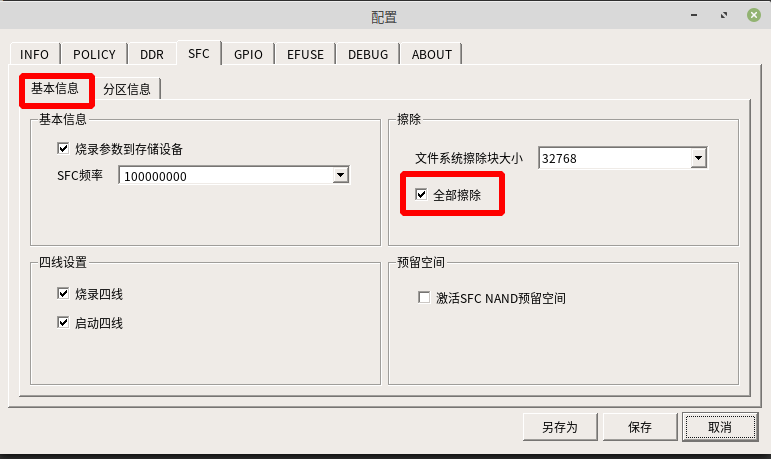
第一次烧录需要勾选全部擦除。
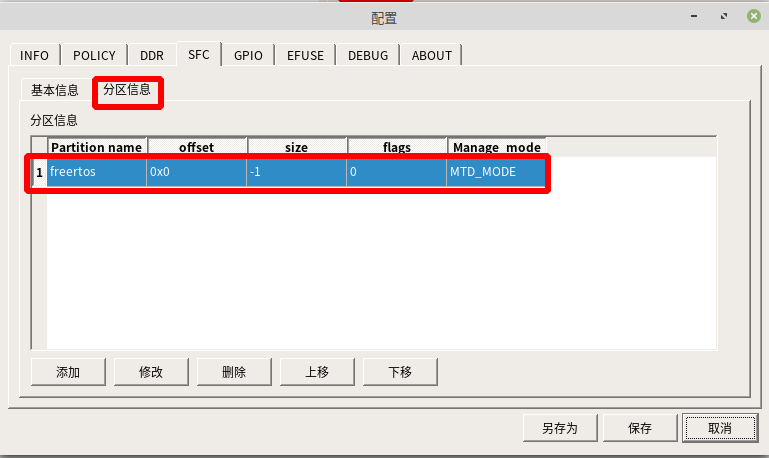
Partition name 为 freertos ,这里的名称可以修改
Manage mode选择 MTD_MODE
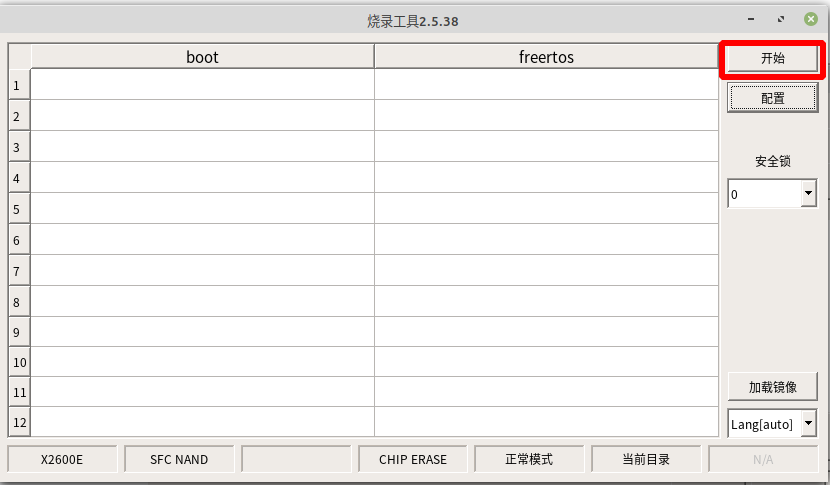
保存烧录工具配置以后,点击开始进行烧录。先按住开发板BOOT_KEY键不放,然后按下RST_KEY按键以后,进入烧录模式,烧录成功的界面如下: