X2600 PWM
一 功能简介
PWM
- 16 通道,输出频率最大 50Mhz,分辨率最大 500Mhz
- 支持 cpu/dma 模式
二 PWM配置方法
以PD_X2600E_VAST_V2.0开发板为例 , 使用x2600e_vast_nand_defconfig配置 , 实际根据硬件需要配置
pwm配置

三 PWM测试例子
3.1 测试代码
pwm_test
此处以GPIO_PC(11)和GPIO_PC(13)为例, 分别申请pwm资源, 配置pwm信息, 配置完后会打印对应通道频率, 设置pwm调制级数
pwm_dma_test
此处以GPIO_PC(11)为例, 申请pwm资源, 初始化PWM的dma模式 , 使用dma模式更新pwm的频率
pwm_multi_channel_sync_test
此处以GPIO_PC(11)和GPIO_PC(13)为例, 分别申请pwm资源, 配置pwm信息, 配置完后会打印对应通道频率
预初始化申请到的两个pwm通道的使能, 设置pwm调制级数, 两个pwm通道同时开启
(需要pwm多通道同时开启后才会输出波形, 预初始化后设置pwm调制级数并不会工作)
pwm_dma_multi_channel_sync_test
此处以GPIO_PC(11)和GPIO_PC(13)为例, 分别申请pwm资源, 预初始化申请到的两个pwm通道的使能
初始化PWM的dma模式 , 使用dma模式更新pwm的频率,两个pwm通道同时开启
(需要pwm多通道同时开启后才会输出波形, 预初始化后使用dma模式更新pwm的频率并不会工作)
代码位于freertos/example/driver/pwm_example.c
#include <driver/pwm.h>
#include <driver/gpio.h>
#include <common.h>
struct pwm_config_data pwm0_config = {
.shutdown_mode = PWM_graceful_shutdown, /* 设置PWM停止输出时以一个完整的周期结束 */
.idle_level = PWM_idle_low, /* 设置PWM空闲电平为低电平 */
.accuracy_priority = PWM_accuracy_levels_first, /* 设置输出PWM时,优先满足pwm的级数 */
.freq = 120000, /* 设置PWM频率为12kHz,在选择了优先满足PWM级数的情况下最终调制后的频率不等于120kHz */
.levels = 5000, /* 设置PWM最大级数为5000 */
.clk_id = "rtc", /* 设置PWM时钟源为RTC,可参考对应SOC中的clk.h,选填"pclk" " "rtc" "ext1"*/
};
void pwm0_test(void)
{
int pwm0 = pwm_request(GPIO_PC(11), "pwm0");
pwm_config(pwm0, &pwm0_config);
/* 如果有需要可以使用 pwm_get_freq 获取 PWM 最终调制后的频率 */
printf("real freq: %ld\n", pwm_get_freq(pwm0));
pwm_set_level(pwm0, 500);/* 设置 level 值,输出相对应的 PWM */
mdelay(1000);
pwm_set_level(pwm0, 0);/* 当 level 值为0, 停止输出 PWM */
}
struct pwm_config_data pwm1_config = {
.shutdown_mode = PWM_abrupt_shutdown, /* 设置PWM在停止输出时立刻将pwm设置成空闲时电平 */
.idle_level = PWM_idle_high, /* 设置PWM空闲电平为高电平 */
.accuracy_priority = PWM_accuracy_freq_first, /* 设置输出PWM时,优先满足PWM调制后频率的精度 */
.freq = 1000000, /* 设置PWM调制后频率为1MHz */
.levels = 100, /* 设置PWM最大级数为100 */
.clk_id = NULL, /* 对于置NULL的时钟源,默认选择ext1作为时钟源 */
};
void pwm1_test(void)
{
int pwm1 = pwm_request(GPIO_PC(13), "pwm1");
pwm_config(pwm1, &pwm1_config);
/* 如果有需要可以使用 pwm_get_freq 获取 PWM 最终调制后的频率 */
printf("real freq: %ld\n", pwm_get_freq(pwm1));
pwm_set_level(pwm1, 50);
mdelay(100);
pwm_release(pwm1);
}
void pwm_test(void)
{
pwm0_test();
pwm1_test();
}
//////////////////////////////////////////////
struct pwm_data pwm_data[] = {
{
.low = 1000,
.high = 1000,
},
{
.low = 2000,
.high = 2000,
},
{
.low = 3000,
.high = 3000,
},
{
.low = 4000,
.high = 4000,
},
};
struct pwm_dma_data pwm_dma_data = {
.data = pwm_data,
.data_count = 4,
.dma_loop = 1,//循环dma模式:函数不会阻塞,需要调用pwm_dma_disable_loop停止dma
};
struct pwm_dma_config dma_config;
void pwm_dma_test(void)
{
int rate;
int pwm0 = pwm_request(GPIO_PC(11), "pwm1");
memset(&dma_config, 0, sizeof(struct pwm_dma_config));
dma_config.idle_level = PWM_idle_low;
dma_config.start_level = PWM_start_high;
rate = pwm_dma_init(pwm0, &dma_config);
if (rate < 0) {
printf("pwm_dma_init failed!\n");
}
pwm_dma_update(pwm0, &pwm_dma_data);
}
struct pwm_config_data pwm0_sync_config = {
.shutdown_mode = PWM_graceful_shutdown, /* 设置PWM停止输出时以一个完整的周期结束 */
.idle_level = PWM_idle_low, /* 设置PWM空闲电平为低电平 */
.accuracy_priority = PWM_accuracy_freq_first, /* 设置输出PWM时,优先满足pwm的频率 */
.freq = 1000000, /* 设置PWM频率为1MHz */
.levels = 500, /* 设置PWM最大级数为500 */
};
struct pwm_config_data pwm1_sync_config = {
.shutdown_mode = PWM_graceful_shutdown, /* 设置PWM停止输出时以一个完整的周期结束 */
.idle_level = PWM_idle_low, /* 设置PWM空闲电平为低电平 */
.accuracy_priority = PWM_accuracy_freq_first, /* 设置输出PWM时,优先满足pwm的频率 */
.freq = 2000000, /* 设置PWM频率为2MHz */
.levels = 100, /* 设置PWM最大级数为100 */
};
void pwm_multi_channel_sync_test(void)
{
int pwm0 = pwm_request(GPIO_PC(11), "pwm0");
int pwm1 = pwm_request(GPIO_PC(13), "pwm1");
unsigned int channels = 0;
pwm_config(pwm0, &pwm0_sync_config);
pwm_config(pwm1, &pwm1_sync_config);
/* 如果有需要可以使用 pwm_get_freq 获取 PWM 最终调制后的频率 */
printf("real freq: %ld\n", pwm_get_freq(pwm0));
printf("real freq: %ld\n", pwm_get_freq(pwm1));
pwm_set_not_really_enable(pwm0, 1);
pwm_set_not_really_enable(pwm1, 1);
pwm_set_level(pwm0, 100);
pwm_set_level(pwm1, 50);
channels |= (1 << pwm0);
channels |= (1 << pwm1);
pwm_enable_channels(channels);
mdelay(5000);
pwm_disable_channels(channels);
pwm_release(pwm0);
pwm_release(pwm1);
}
struct pwm_data pwm0_dma_sync_data[] = {
{
.low = 1000,
.high = 1000,
},
{
.low = 2000,
.high = 2000,
},
{
.low = 3000,
.high = 3000,
},
{
.low = 4000,
.high = 4000,
},
};
struct pwm_data pwm1_dma_sync_data[] = {
{
.low = 4000,
.high = 4000,
},
{
.low = 3000,
.high = 3000,
},
{
.low = 2000,
.high = 2000,
},
{
.low = 1000,
.high = 1000,
},
};
struct pwm_dma_data pwm0_dma_sync_data_config = {
.data = pwm0_dma_sync_data,
.data_count = 4,
.dma_loop = 1,
};
struct pwm_dma_data pwm1_dma_sync_data_config = {
.data = pwm1_dma_sync_data,
.data_count = 4,
.dma_loop = 1,
};
struct pwm_dma_config pwm0_dma_sync_config;
struct pwm_dma_config pwm1_dma_sync_config;
void pwm_dma_multi_channel_sync_test(void)
{
int pwm0 = pwm_request(GPIO_PC(11), "pwm0");
int pwm1 = pwm_request(GPIO_PC(13), "pwm1");
unsigned int channels = 0;
pwm_set_not_really_enable(pwm0, 1);
pwm_set_not_really_enable(pwm1, 1);
memset(&pwm0_dma_sync_config, 0, sizeof(struct pwm_dma_config));
pwm0_dma_sync_config.idle_level = PWM_idle_low;
pwm0_dma_sync_config.start_level = PWM_start_high;
memset(&pwm1_dma_sync_config, 0, sizeof(struct pwm_dma_config));
pwm1_dma_sync_config.idle_level = PWM_idle_low;
pwm1_dma_sync_config.start_level = PWM_start_high;
pwm_dma_init(pwm0, &pwm0_dma_sync_config);
pwm_dma_init(pwm1, &pwm1_dma_sync_config);
pwm_dma_update(pwm0, &pwm0_dma_sync_data_config);
pwm_dma_update(pwm1, &pwm1_dma_sync_data_config);
channels |= (1 << pwm0);
channels |= (1 << pwm1);
pwm_enable_channels(channels);
mdelay(5000);//延时5s后关闭pwm
pwm_disable_channels(channels);
pwm_release(pwm0);
pwm_release(pwm1);
}
//////////////////////////////////////////////
3.2 测试程序编译和使用
在freertos/vendor目录下添加测试程序文件pwm_example.c, 并在Makefile添加
src-y += vendor.c pwm_example.c
在vendor.c中引用pwm_example.c中的函数, 并添加相关头文件
#include <stdio.h>
#include <driver/pwm.h>
#include <driver/gpio.h>
#include <common.h>
void vendor_init(void)
{
printf("vendor init...\n");
pwm_test();
pwm_multi_channel_sync_test();
pwm_dma_multi_channel_sync_test();
}
四 编译和烧录
bhu@bhu-PC:~/rtos$ cd freertos
bhu@bhu-PC:~/rtos/freertos$ source build/envsetup.sh //第一次编译需要初始化编译环境
bhu@bhu-PC:~/rtos/freertos$ make x2600e_vast_nand_defconfig
bhu@bhu-PC:~/rtos/freertos$ make
bhu@bhu-PC:~/rtos/freertos$ ls rtos-with-spl.bin
rtos-with-spl.bin //编译出来的文件
请使用最新版烧录工具
wget ftp://szingenic:hq7Wy0gws@ftp.ingenic.com.cn/DevSupport/Tools/USBBurner/cloner-latest-ubuntu.tar.gz
wget ftp://szingenic:hq7Wy0gws@ftp.ingenic.com.cn/DevSupport/Tools/USBBurner/cloner-latest-windows.zip
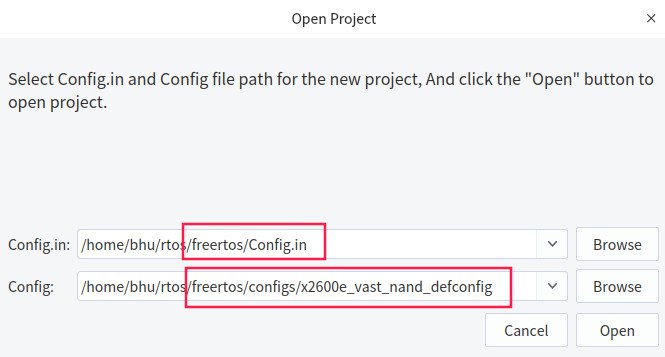
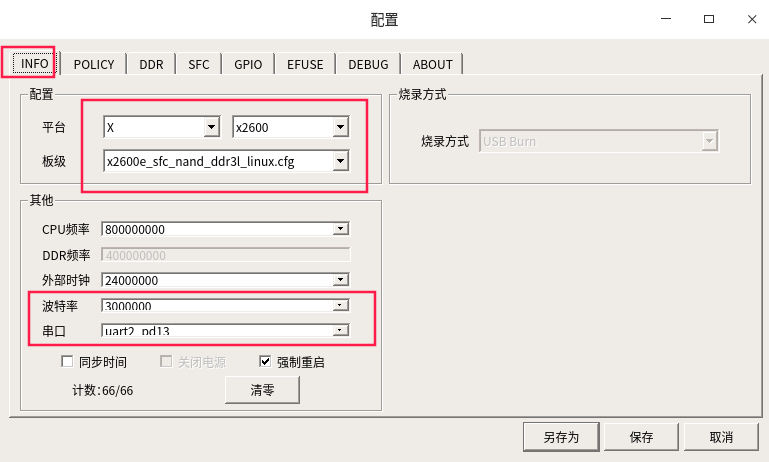
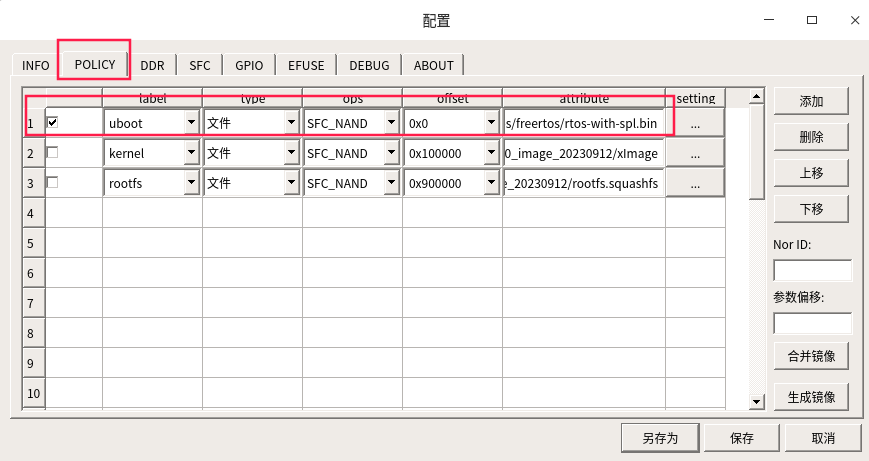
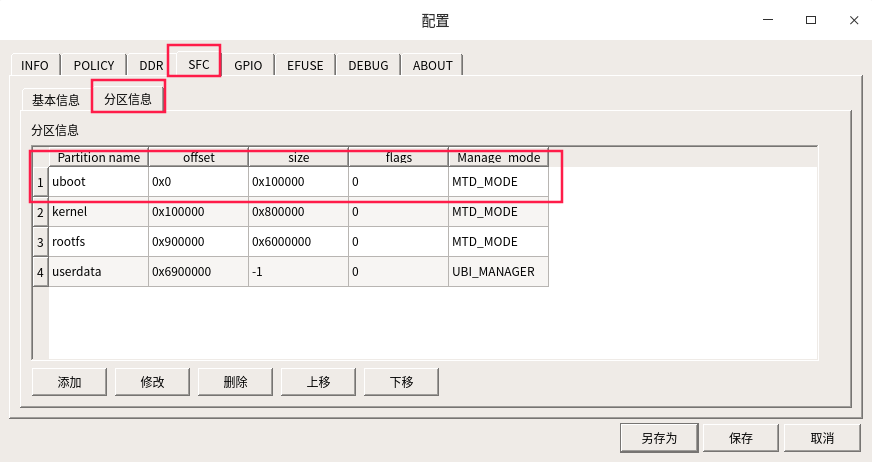
烧录配置
五 测试结果
[0.150926] vendor init...
[0.151027] real freq: 120000 //GPIO_PC(11)开启pwm通道后的频率打印
[1.151172] real freq: 1000000 //GPIO_PC(13)开启pwm通道后的频率打印
[1.251290] real freq: 1000000 //多通道同时开启GPIO_PC(11)频率的打印
[1.251392] real freq: 2000000 //多通道同时开启GPIO_PC(13)频率的打印
可以使用示波器测试gpio申请到的pwm通道频率是否与设置一致
六 PWM 应用接口分析
相关源码见freertos/drivers目录下的pwm.c
包含头文件:
#include <driver/gpio.h>
#include <driver/pwm.h>
pwm使用流程:
1.申请 PWM 资源 pwm_request
2.配置 PWM 信息 pwm_config
3.设置 PWM 调制级数 pwm_set_level
4.释放 PWM 资源 pwm_release
5.获取 PWM 调制后频率 pwm_get_freq
6.初始化PWM的dma模式 pwm_dma_init
7.使��用dma模式更新PWM的频率 pwm_dma_update
8.停止dma的循环模式 pwm_dma_disable_loop
9.用于多通道同时开启时的使能 pwm_set_not_really_enable
10.用于多通道同时开启时的失能 pwm_set_not_really_disable
11.多通道同时开启 pwm_enable_channels
12.多通道同时关闭 pwm_disable_channels
api详解:
int pwm_request(int gpio, const char *name)
功能:申请 PWM 资源
参数:
gpio:指定 GPIO 号
name:PWM 名称
返回值:
成功:返回申请的PWM通道号
失败:负值
int pwm_config(int ch, struct pwm_config_data* config)
功能:设置 PWM 信息
参数:
ch:PWM 通道号
config:PWM 配置数据
返回值:
成功 : 0
失败 : 非0
void pwm_release(int ch)
功能:释放 PWM 资源
参数:
ch:PWM 通道号
void pwm_set_level(int ch, unsigned long level)
功能:设置 PWM 调制级数
参数:
ch:PWM 通道号
level:pwm 调制级数,即一个周期内非空闲电平长度
unsigned long pwm_get_freq(int ch)
功能:获取当前已设置的时钟频率,并将其返回
参数:
ch:PWM 通道号
返回值:
获取 PWM 最终调制后的频率
int pwm_dma_init(int id, struct pwm_dma_config *dma_config)
功能:初始化 PWM 的 dma 模式
参数:
id:PWM 通道号
dma_config:PWM dma 模式的配置信息
返回值:
成功 : 返回 dma 模式频率
失败 : 返回 -1
int pwm_dma_update(int id, struct pwm_dma_data *dma_data)
功能:使用 dma 模式连续更新 PWM 的频率
普通dma模式: 函数会阻塞到 dma 数据全部转换成对应pwm输出(多通道同时开启模式下不阻塞)
循环dma模式:函数不会阻塞,需要调用pwm_dma_disable_loop停止dma
参数:
id:PWM 通道号
dma_data:PWM dma 模式需要输出的数据
返回值:
成功 : 返回 0
失败 : 返回 -1
int pwm_dma_disable_loop(int id)
功能:停止 dma 的循环模式
参数:
id:PWM 通道号
返回值:
成功 : 返回 0
失败 : 返回 -1
void pwm_set_not_really_enable(int id, int enable)
功能:预初始化功能的使(失)能,使能后在调用pwm_enable_channels之前不会开始工作
即当使用该功能时,调用pwm_set_level和pwm_dma_update只是设置,不会工作
只有当调用pwm_enable_channels时才会输出波形
pwm dma的非loop模式下,需要知道是否完成dma传输的话
要在pwm_dma_init时传入dma_config->dma_complete_cb
参数:
id:PWM 通道号
enable:是否使用
void pwm_set_not_really_disable(int id, int enable)
功能:失能后在输出过程中不完�全关闭pwm的功能,保证在下次使用时相位的一致性
直接调用pwm_release依然会关闭pwm功能,过程中将占空比设为0或100时不会关闭pwm
//与上面的函数功能并不成对
参数:
id:PWM 通道号
enable:是否使用
void pwm_enable_channels(unsigned int channels)
功能:多通道同时开启
参数:
channels:需要启动的通道,每位bit对应通道号
void pwm_disable_channels(unsigned int channels)
功能:多通道同时关闭
参数:
channels:需要关闭的通道,每位bit对应通道号
中间参数详解:
PWM配置结构体
struct pwm_config_data {
enum pwm_shutdown_mode shutdown_mode; // 设置PWM波停止后的模式
enum pwm_idle_level idle_level; // 空闲电平
enum pwm_accuracy_priority accuracy_priority; // 设置频率精度和级数精度优先级
char *clk_id; //指定时钟源ID
unsigned long freq; // 频率
unsigned long levels; // PWM调制的级数
};
PWM波停止后的模式枚举
enum pwm_shutdown_mode {
PWM_graceful_shutdown, // pwm停止输出时,尽量保证pwm的信号结尾是一个完整的周期
PWM_abrupt_shutdown, // pwm停止输出时,立刻将pwm设置成空闲时电平
};
空闲电平枚举
enum pwm_idle_level {
PWM_idle_low, // pwm 空闲时电平为低
PWM_idle_high, // pwm 空闲时电平为高
};
频率精度和级数精度优先级枚举
enum pwm_accuracy_priority {
PWM_accuracy_freq_first, // 优先满足pwm的目标频率的精度,级数可能不准确
PWM_accuracy_levels_first, // 优先满足pwm的级数设置,pwm频率可能不准确
};
PWM dma 模式的配置结构体
struct pwm_dma_config {
enum pwm_idle_level idle_level; // 空闲电平
enum pwm_dma_start_level start_level; // 起始电平
/*dma 回调函数,该参数为 NULL 时使用默认回调,为避免指针异常必须进行初始化
仅在多通道同时开启且为dma非loop模式下时,可选择使用该函数,平常使用赋值为NULL*/
void (*dma_complete_cb)(void *data);
};
PWM dma 模式的数据信息
struct pwm_dma_data {
struct pwm_data *data;
unsigned int data_count;
unsigned int dma_loop;
};
dma 模式的起始电平枚举
enum pwm_dma_start_level {
PWM_start_low, /* pwm dma模式的起始电平为低 */
PWM_start_high, /* pwm dma模式的起始电平为高 */
};
dma 模式需要产生的高低电平个数
struct pwm_data {
/* 低电平个数 */
unsigned low:16;
/* 高电平个数 */
unsigned high:16;
};
需要确保 dma 数据的高低电平不能有零计数,否则需要手动把该宏定义打开
#define PWM_CHECK_DMA_DATA
七 PWM命令详解
相关源码见freertos/shell/cmds/drivers目录下的cmds_pwm.c
7.1 shell命令
pwm_request <gpio> <freq> <max_level> [active_level]
功能:请求pwm和配置
参数:gpio //io口的名字
freq //频率
max_level //PWM调制的级数
active_level //活跃电平
example:
pwm_request PC25 2000000 300 1
pwm_setlevel <pwm_id> <level>
功能:设置pwm级数
参数:pwm_id //PWM 通道号
level //pwm 调制级数,即一个周期内非空闲电平长度
example:
pwm_setlevel 0 200
pwm_free <pwm_id>
功能:释放pwm资源
参数:pwm_id //PWM 通道号
example:
pwm_free 0
7.2 shell配置

7.3 具体例⼦
$ pwm_request PC12 2000000 300 1
pwm_id = 13
pwm_freq = 2000000, pwm_levels = 300
idle_level = PWM_idle_high!
current freq: 2000000
$ pwm_setlevel 13 200
pwm_level = 200
$ pwm_free 13
release pwm_13