X2600 TPC
1 热敏打印机介绍
1.1 硬件设备介绍
下面是打印机的硬件设备。
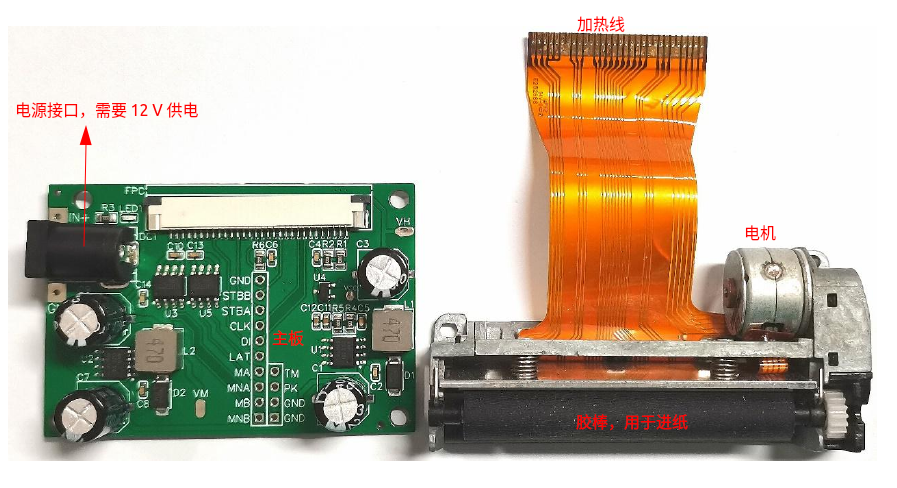
下面是连接完成示意图:

1.2 工作原理
热敏打印机主要组成部分:-
热敏纸:遇热会变黑。
-
步进电机:控制进纸和进纸量。
-
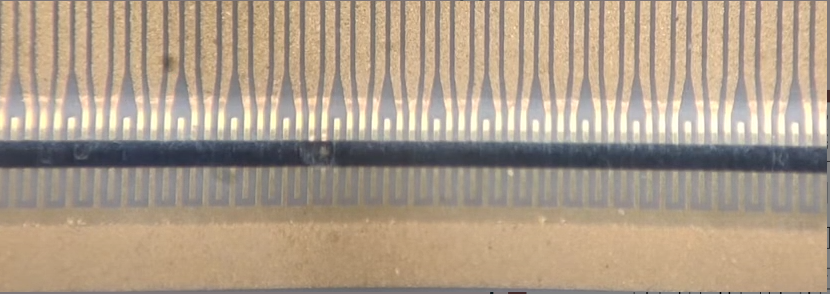
加热元件:用于加热热敏纸,每个加热元件对应一个加热点,所以这个器件决定了打印的最小颗粒, 如下图是加热元件的放大图
-
加热控制:用于控制加热元件加热,一般有多个通道,分别控制不同区域的加热元件。
-
移位锁存寄存器:用于存储要加热的数据,寄存器的每个位对应一个加热点。
-
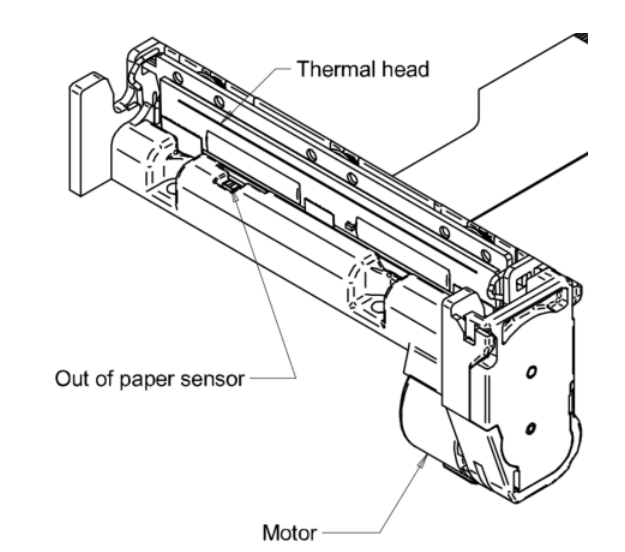
纸张检测传感器:纸张检测,防止没纸时打印。
-
热敏传感器:计算加热头的温度,防止温度过高,烧坏打印机。
- 向移位锁存寄存器发送数据,然后锁存数据。
- 使能加热信号,寄存器对应的位就会加热,使热敏纸颜色发送变化。
- 加热完成后,控制步进电机走纸,走纸的距离取决于每个加热点的大小,即一行的大小。
- 回到步骤 1,直到打印完全部内容。
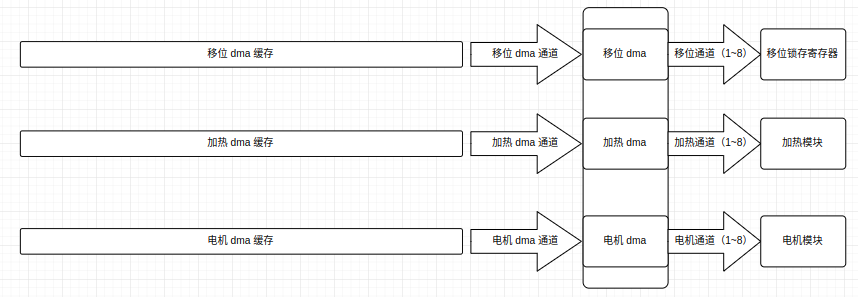
2 X2600 TPC 框架
TPC 为热敏打印机的控制器,热敏打印机主要由热敏头和步进电机组成, 控制器可以控制打印机热敏头的数据传输、加热、锁存等功能,同时控制步进电机的运转, 实现对热敏打印机打印过程的调控。
以下是框架图:
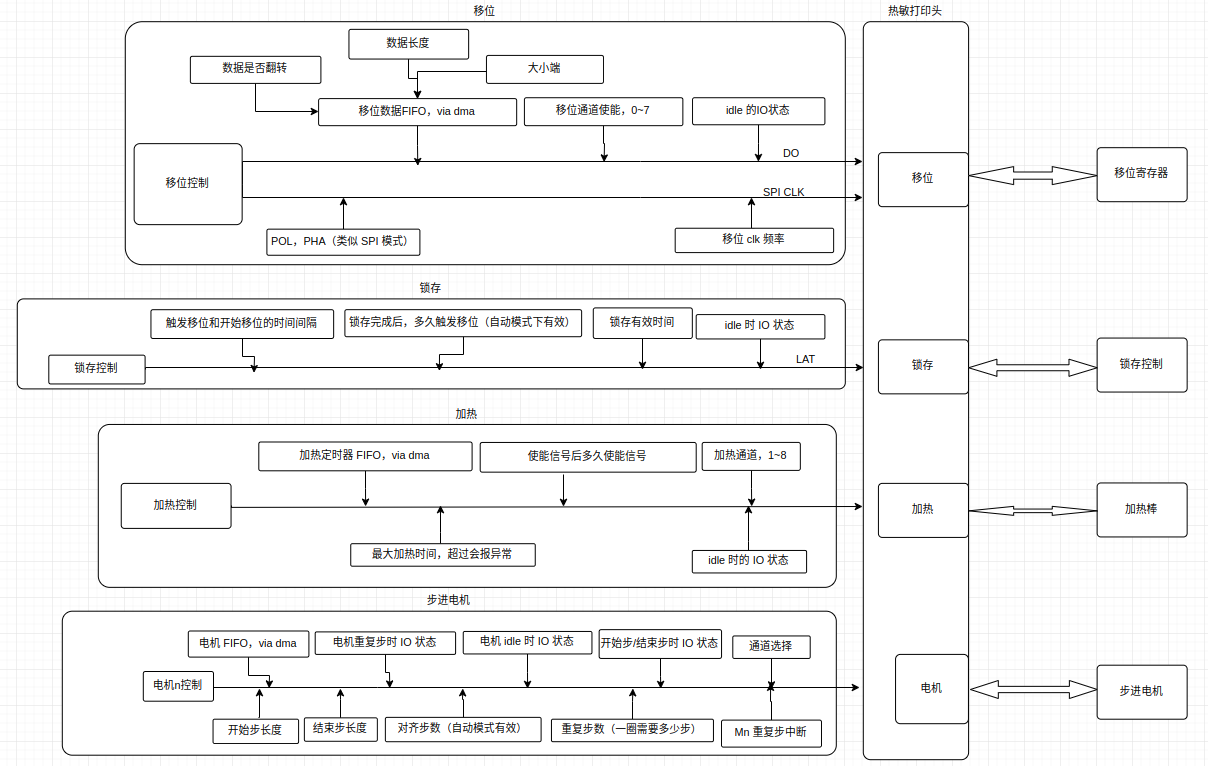
以上为打印机的总体框架图,分为 4 个部分,为移位,锁存,加热,电机控制。通过有序的控制这四个模块,就可以控制热敏打印机。下面粗略介绍一下这四个部分:
- 移位:向移位寄存器发送数据。其发送协议为类似 SPI,有 DI 和 clk 线。对于 X2600,DI 通道可以有 1 到 8 个,当通道 > 4 时,单次单个通通输出的最大数据量为 128 字节,否则为 256 字节。
- 锁存:锁存控制信号线。只有一个通道。
- 加热:加热控制信号线。有 1 到 8 个通道。
- 电机:可作为一个 8 路步进电机单元,可驱动一个 4 相步进电机,也能作为 2 个 4 路步进电机单元,可驱动两个双相步进电机。每个电机的步数最大为 64 步。
这四部分的控制可以分为以下 3 种模式:
- 全自动模式:由控制器自动控制 移位,锁存,加热,电机
- 半自动模式:由控制器自动控制 移位,锁存,加热。电机自己控制,所以需要自己对齐
- 手动控制模式:自己控制 移位,锁存,加热,和电机,自己对齐
3 运行示例
3.1 硬件环境准备
-
准备热敏打印机
介绍:
- 加热点有 384 个,一个移位通道
- 有一个 2相4线 的步进电机,4 步为一圈
- 有两个加热通道
-
准备开发板
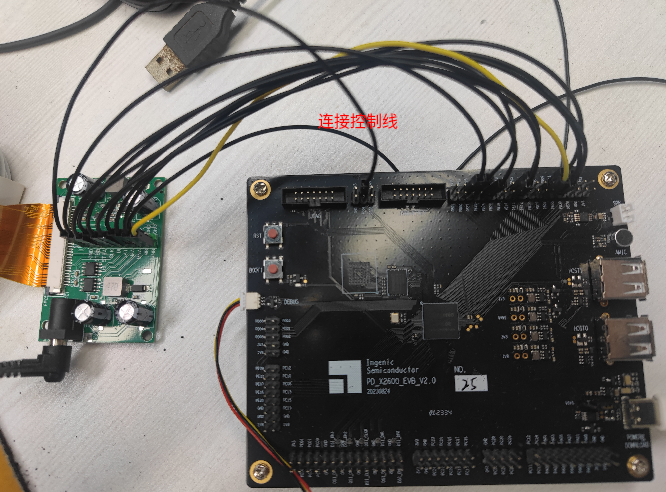
准备一个 x2600 的针板作为主控板,然后将热敏打印机下面表格与主控板连接:
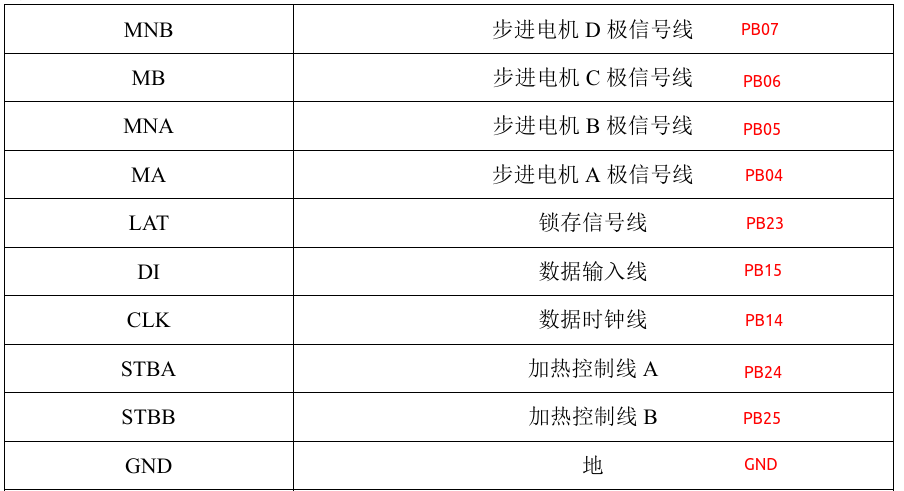
连接完成:
3.2 软件环境准备
编译固件
3.2.1 编译大核固件
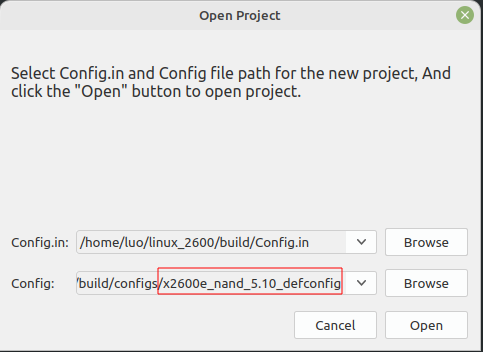
打开 x2600e_nand_5.10_defconfig 配置文件
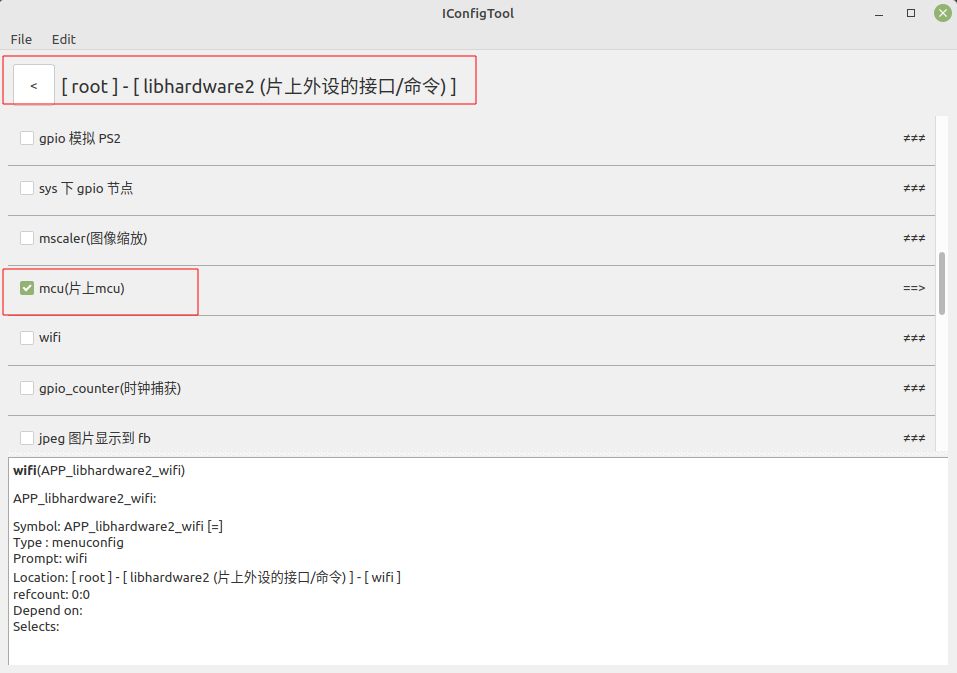
勾选 mcu 驱动和命令:

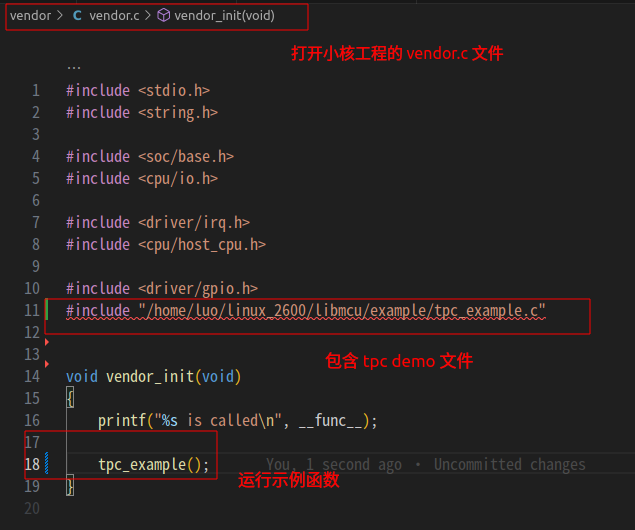
勾选 tpc demo(demo 位于 linux 工程的 libhardware2/src/cmds/demo_tpc/demo_tpc_tx_shift_data.c):

然后编译工程:
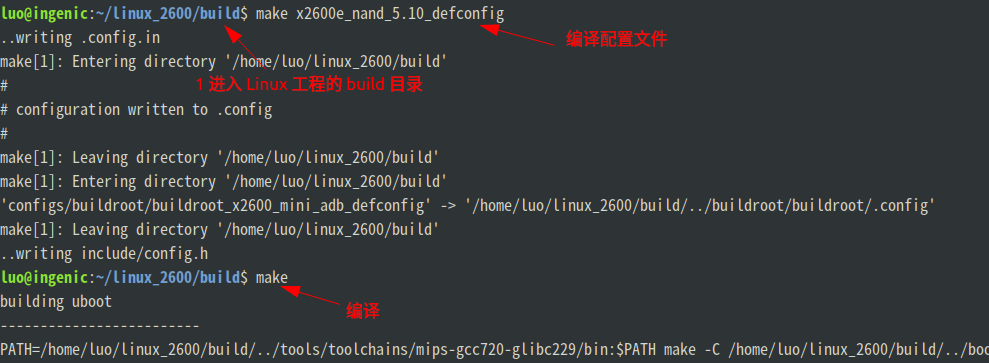
编译完成:

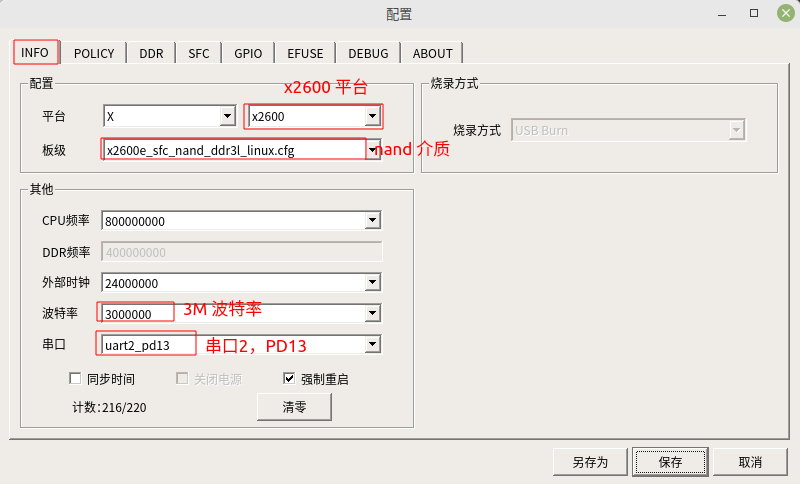
烧录: 配置烧录工具:
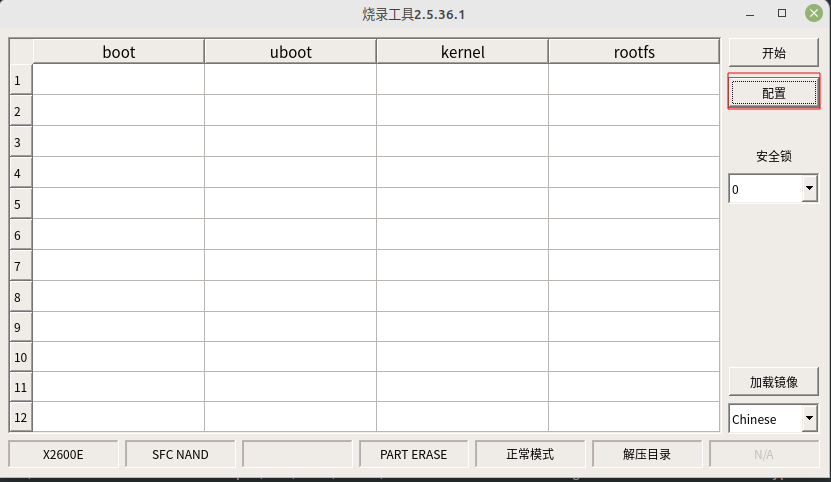
选择平台和配置文件(nand 为例),选择串口:
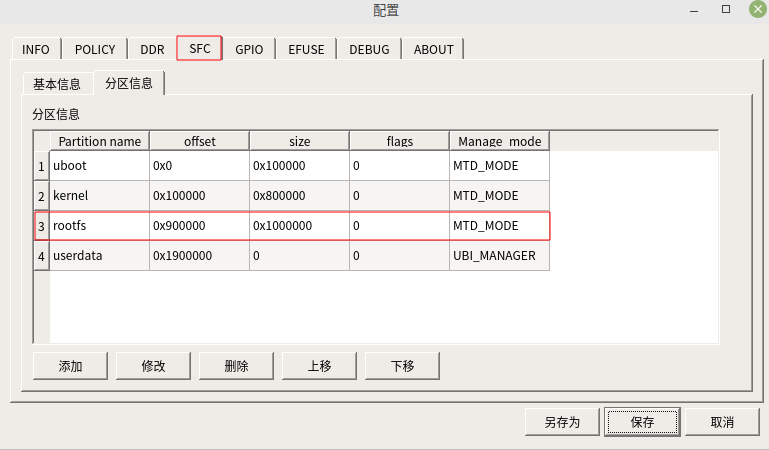
修改 文件系统 的分区格式:(烧录工具默认文件系统为 UBI mos,需要改为 MTB 模式)
选择烧录固件:
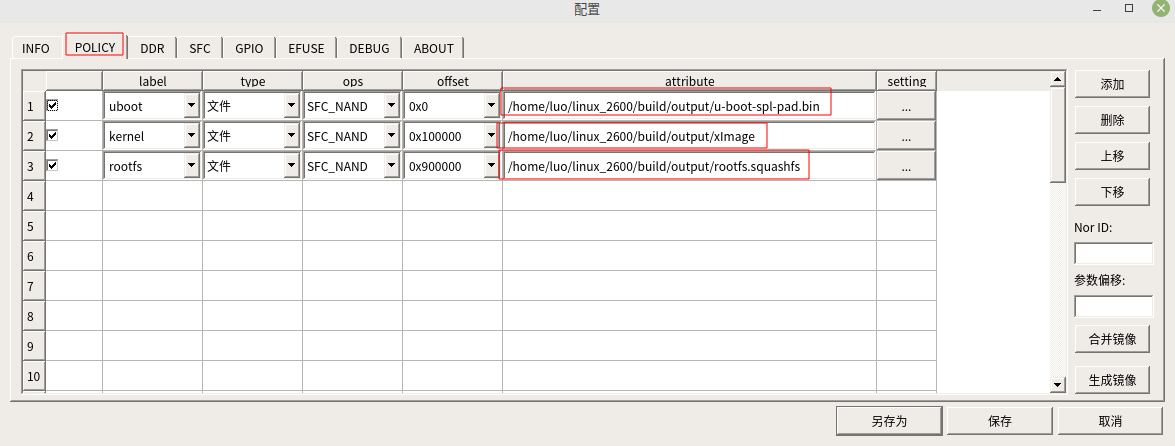
保存之后开始烧录
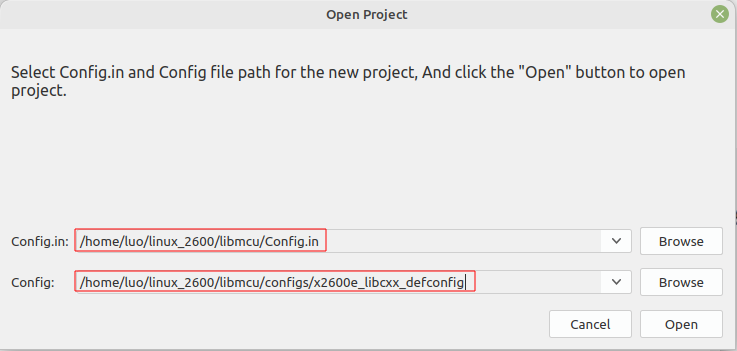
3.2.2 编译小核固件
打开配置文件:
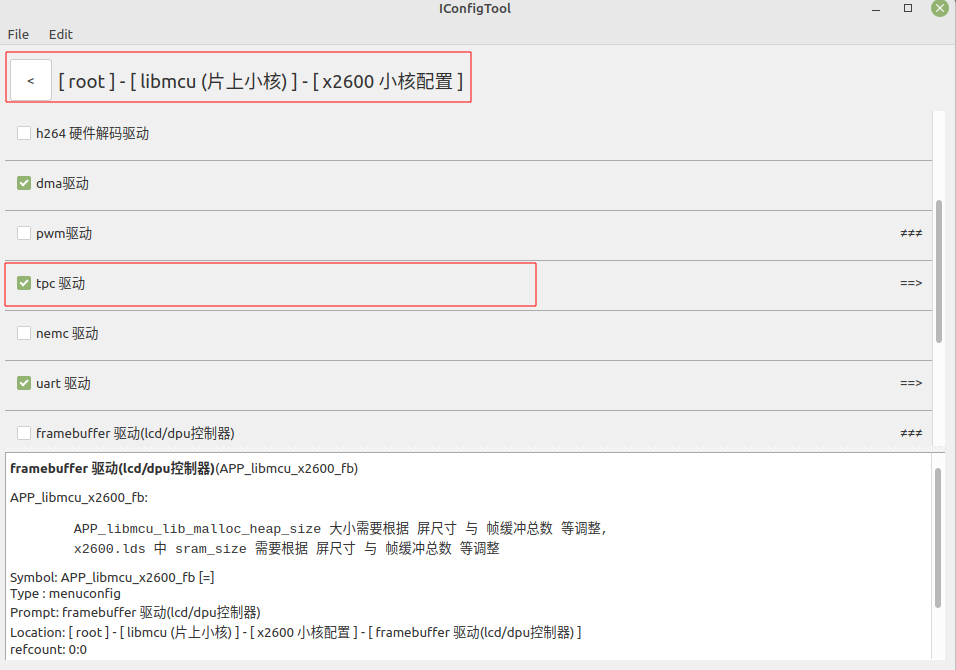
勾选 tpc 驱动:
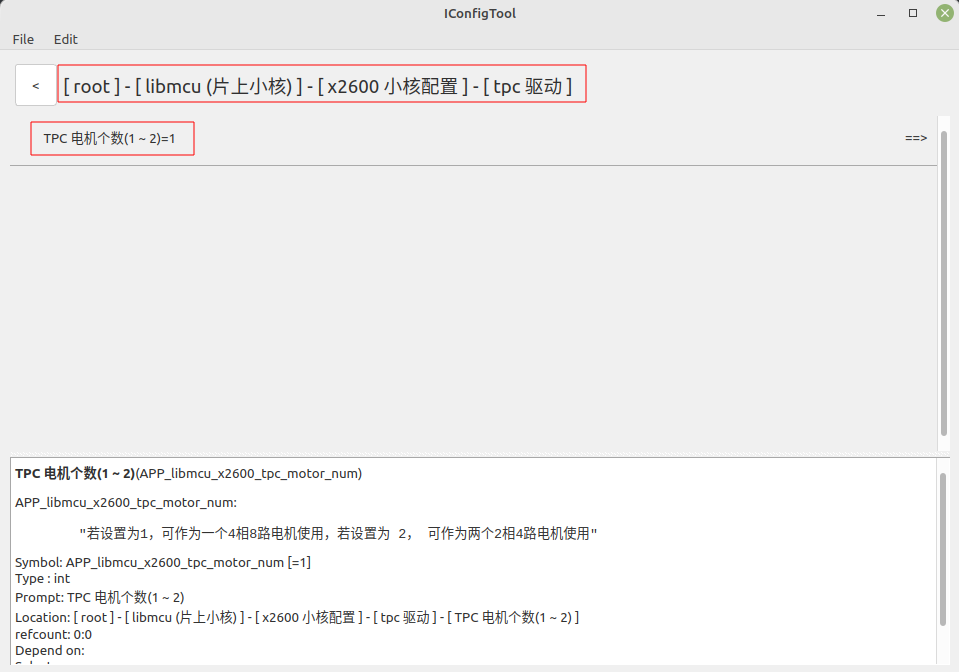
选择电机个数:
选择小核 demo:
编译小核固件:
# 切换到工程小核libmcu的编译目录
cd libmcu/
# 配置编译器路径
export PATH=../tools/toolchains/riscv-r1.0.0/bin/:$PATH
# 编译对应的配置文件
make x2600e_libcxx_defconfig
# 编译小核(生成libmcu-bare.bin小核镜像文件)
make
# 将libmcu-bare.bin镜像文件adb到开发板的/usr/data或者tmp/可写分区
adb push libmcu-bare.bin /usr/data
使用小核的工具链时,编译时会报错提醒说没有 libmpfr.so.4 库, 软链接到 /usr/lib/x86_64-linux-gnu/libmpfr.so.6.0.1 文件即可。 仅需链接一次 sudo ln -s /usr/lib/x86_64-linux-gnu/libmpfr.so.6.0.1 /usr/lib/x86_64-linux-gnu/libmpfr.so.4
3.3 运行
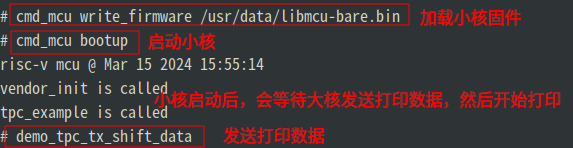
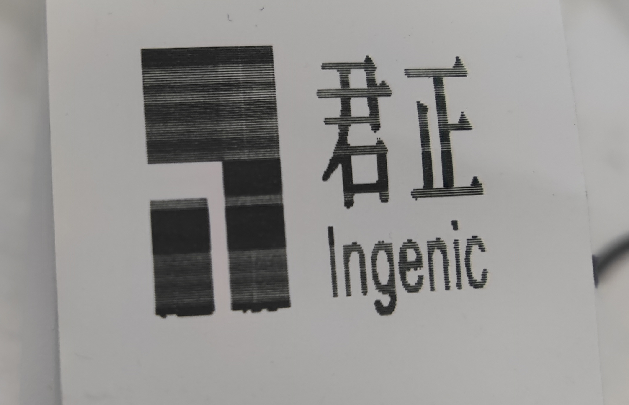
打印结果:
3.4 示例讲解
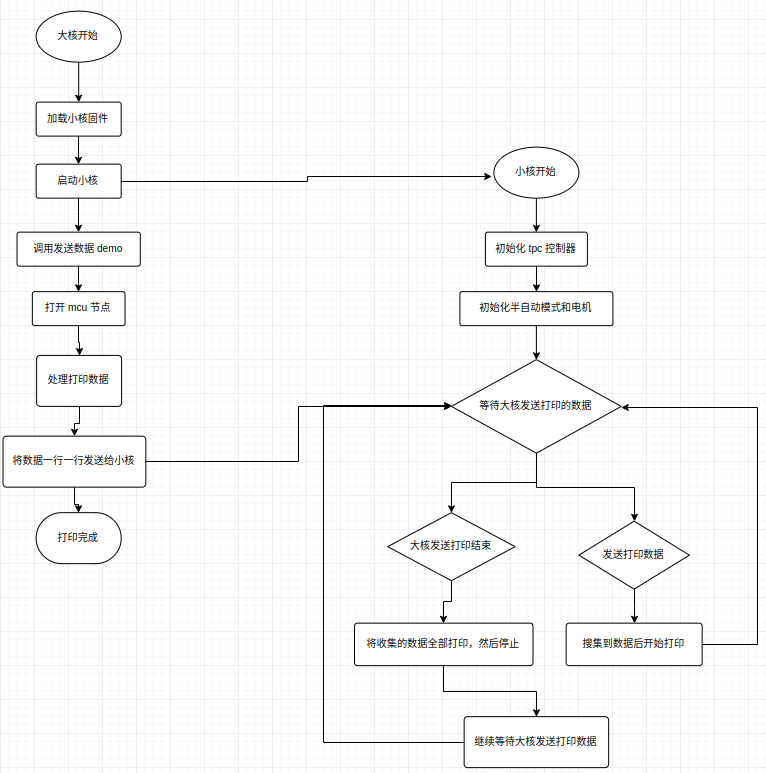
demo 流程图(示例用到的 api 在下面章节有讲解,具体实现请看 demo):
大核 demo(demo 位于 linux 工程的 libhardware2/src/cmds/demo_tpc/demo_tpc_tx_shift_data.c):
int main(void)
{
int mcu_fd = mcu_open(); // 打开 MCU 节点
if (mcu_fd < 0) {
fprintf(stderr, "failed to open mcu\n");
return -1;
}
int width = (gImage_ingenic_image[2] << 8) + gImage_ingenic_image[3];
int height = (gImage_ingenic_image[4] << 8) + gImage_ingenic_image[5];
int ret;
unsigned char *src_data = &gImage_ingenic_image[6];
unsigned char *dst_data = malloc(SHIFT_LINES_BYTES);
int cnt = height;
int widthbyte = width / 8 + (width % 8 ? 1 : 0);
while(cnt) {
/*准备好一行 图片数据*/
Print_Picture(0, src_data, width, height, dst_data, SHIFT_LINES_BYTES); //处理打印数据
src_data += widthbyte;
/*等待小核准备好*/
ret = wait_mcu_is_ready(mcu_fd);
if (ret < 0)
continue;
/*写一行数据*/
mcu_write_data(mcu_fd, dst_data, SHIFT_LINES_BYTES); //将数据发送给小核
cnt--;
}
/*等待小��核准备好收数据*/
wait_mcu_is_ready(mcu_fd);
/*发送结束信息*/
mcu_write_data(mcu_fd, "tpc_data_end", strlen("tpc_data_end")); //发送打印结束
mcu_close(mcu_fd);
return 0;
}
小核 demo (位于 linux 工程的 libmcu/example/tpc_example.c)
void tpc_example(void)
{
printf("%s is called\n", __func__);
#ifdef APP_libmcu_driver_irq
host_cpu_set_irq_callback(host_irq_cb);
#endif
tpc_init();//初始化 tpc 控制器
int ret;
//初始化半自动模式:自动控制移位,锁存,加热,电机自己控制
ret = tpc_sync_mode_init(&shift_cfg, &heat_cfg, &lat_cfg, NULL, -1);
if (ret < 0)
return;
ret = tpc_motor_init(MOTOR_ID, &motor_cfg_0);//初始化电机
if (ret < 0)
return;
unsigned char shift_data[2048];
int shift_size = 0;
int heat_size = sizeof(struct heat_data);
struct heat_data *heat_data = malloc(heat_size);
int motor_size = MOTOR_REPEAT_STEP * sizeof(int);
unsigned int *motor_data = malloc(motor_size);
int heat_clkcnt = TPC_US_CLKCNT(10 * 1000);
int cnt = 0;
while (1) {
/*通知大核 准备好接收数据*/
mcu_tpc_is_ready();
memset(shift_data, 0, sizeof(shift_data));
//接收大核传过来的打印数据
shift_size = mcu_read_host_tpc_data(shift_data, sizeof(shift_data));
motor_data[0] = TPC_US_CLKCNT(10 * 1000);
motor_data[1] = TPC_US_CLKCNT(10 * 1000);
motor_data[2] = TPC_US_CLKCNT(10 * 1000);
motor_data[3] = TPC_US_CLKCNT(10 * 1000);
/*与全对齐模式相比,电机不对齐的话,得手动计算加热到下一行的锁存的延时时间*/
uint64_t heat_delay_clkcnt = motor_data[0] + motor_data[1] + motor_data[2] + motor_data[3] - heat_clkcnt;
heat_data[0].nxt_trigger_type = TPC_HEAT_TRIGGER_BY_LATCH | heat_delay_clkcnt;
heat_data[0].channels[0] = TPC_HEAT_ENABLE | heat_clkcnt;
heat_data[0].channels[1] = TPC_HEAT_ENABLE | heat_clkcnt;
if (strcmp("tpc_data_end", (char *)shift_data) == 0) {
tpc_sync_mode_data_stream_end();//结束半自动模式数据搬运,会将 dma 缓存的数据全部搬完后停止
tpc_motor_data_stream_end(MOTOR_ID);//结束电机的数据搬运,会将 dma 缓存的数据全部搬完后停止
tpc_sync_mode_stop(0);//停止半自动模式,不立刻停止
tpc_motor_stop(MOTOR_ID, 0);//停止电机,不立刻停止
cnt = 0;
continue;
}
//将数据写入 dma 缓存
write_sync_mode_data(shift_data, (void *)heat_data, (void *)motor_data, shift_size, heat_size, motor_size);
/*收到32行数据后(内部默认申请32行 buffer大小)开始输出*/
cnt++;
if (cnt == 32) {
tpc_sync_mode_start();//开始半自动模式
tpc_motor_start(MOTOR_ID);//开始电机
}
}
}
4 代码实现(重要)
4.1 TPC ��四个结构体讲解
以下代码均在小核工程的 libmcu/soc/x2600/include/soc/tpc_data.h 文件中。
这四个结构体用于配置 tpc 的 4 个模块,分别是 移位,加热,锁存,电机。
4.1.1 移位结构体
配置结构体:
struct tpc_shift_cfg {
uint8_t idle_level; /* 空闲时的电平状态 */
uint8_t big_end; /* 大小端 */
/**
* 极性 spi_pol :
* 当spi_pol=0,在时钟空闲即无数据传输时,clk电平为低电平
* 当spi_pol=1,在时钟空闲即无数据传输时,clk电平为高电平
* 相位 spi_pha :
* 当spi_pha=0,表示在第一个跳变沿开始传输数据,下一个跳变沿完成传输
* 当spi_pha=1,表示在第二个跳变沿开始传输数据,下一个跳变沿完成传输
*/
uint8_t spi_pol;
uint8_t spi_pha;
uint8_t channels; /* 数据输出通道数1 ~ 8*/
uint8_t data_invert; /* 移位数据取反*/
uint8_t line_bytes; /* 数据输出总长度 (通道数大于4时每个通道单次输出最大是128(字节),小于4通道单次输出最大是256(字节),
* 每次发送数据时,各个通道的发送的数据量都相同,例如:
* 一行打�印数据为 1024bit,5 数据通道打印头,设通道 0~通道 3 为 208bit, 通道 4 为 192bit,每个通道
* 的数据存储单位为字节, 输出数据的长度相等。那么通道 0 ~ 通道 4 数据输出长度为 26 字节,通道 0 ~ 通道 3 有
* 效数据长度为 26 字节,通道 4 有效数据长度为 24 字节,通道 4 中无效数据先行输出。
*/
uint64_t out_clk_rate; /* spi clk */
tpc_irq_callback irq_callback; /* 中断函数回调指针 */
};
3.1.2 加热结构体
配置结构体:
struct tpc_heat_cfg {
int channels; /* 热信号通道1 ~ 8 */
int idle_level; /* 热信号空闲时电平 */
uint64_t max_heat_clkcnt; /* 最大加热时间(clk cnt),当加热时间超过时会报错 */
tpc_irq_callback irq_callback; /* 中断函数回调指针 */
};
3.1.3 锁存结构体
配置结构体:
struct tpc_lat_cfg {
int idle_level; /* 锁存的空闲时电平 */
int active_clkcnt; /* 锁存有效持续时间 */
uint64_t wait_clkcnt_out; /* 触发输出锁存信号之后,等待多少个时钟才开始输出(clk cnt) */
uint64_t wait_clkcnt_out_shift; /* 锁存输出完后,等待等待多少个时钟触发移位数据, 仅全自动/半自动模式有效 (clk cnt)*/
tpc_irq_callback irq_callback; /* 中断函数回调指针 */
};
3.1.4 电机结构体
配置结构体:
/*电机控制器支持1个 8路电机或者 两个4路的电机*/
struct tpc_motor_cfg {
int channels; /* id0 通道数为 1 ~ 8,当id0 大于4通道时, id1不可用 */
uint8_t idle_level; /* 电机io idle 时的电平 例如:
* 0b0101 代表4个channels, 从1通道开始依次是 1 0 1 0
*/
uint8_t start_step_io; /* 电机io开始步时的电平 */
uint8_t stop_step_io; /* 电机io结束步时的电平 */
uint64_t start_step_clkcnt; /* 开始步步长(clk cnt)*/
uint64_t stop_step_clkcnt; /* 结束步步长(clk cnt)*/
int repeat_step; /* 电机循环步数,最大64步 */
unsigned long long repeat_step_io[MAX_MOTO_IO]; /* 每步对应的 io 电平,例如:一个 4 路,8 步电机
* .repeat_step_io = {
* [0] = 0b11001100,
* [1] = 0b00110011,
* [2] = 0b01100110,
* [3] = 0b10011001,
* }
* 则 第一步时,各路电平为 0:0 1:1 2:0 3:1
* 第二步时,各路电平为:0:0 1:1 2:1 3:0
* ······
*/
int align_step; /* 在周期内的第几步触发加热,具体请看 重要提示 中的对 align_step 的解释 */
uint64_t max_step_clkcnt; /* 电机步的最大步长(clk cnt) */
tpc_irq_callback irq_callback; /* 中断函数回调指针 */
};
4.2 数据流图
这三个缓存的数据格式如下:
-
移位
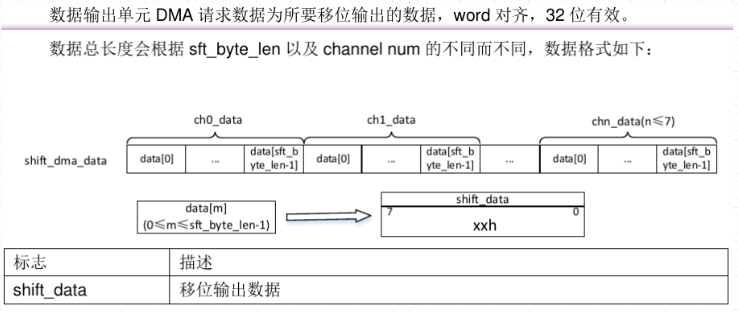
针对这个格式,demo 声明了一个数据结构:
unsigned char shift_data[sum];
/*
使用示例:384 个打印点,共 48 个字节,然后打印虚线
第一行数据:
shift_data[0]=0b10101010;
······
shift_data[47]=0b10101010;
第二行数据:
shift_data[48]=0b10101010;
······
shift_data[95]=0b10101010;
······
*/ -
加热:
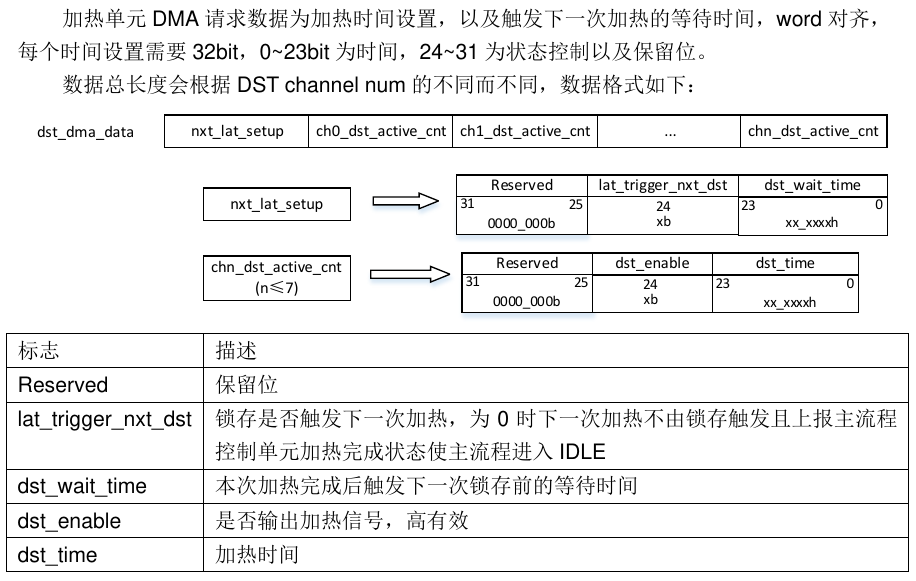
针对这个格式,demo 声明了一个数据结构:
struct heat_data {
unsigned int nxt_trigger_type;
unsigned int channels[2];
}heat_data[sum];
/*
使用示例:两个加热通道
第一次加热:
heat_data[0].nxt_trigger_type = 1 << 24 | TPC_US_CLKCNT(2*1000);
锁存触发加热,加热完成后延时 2ms 触发下一次锁存,仅全自动、半自动模式有效
heat_data[0].channels[0] = 1 | TPC_US_CLKCNT(2*1000); 使能加热,加热时间为 2ms
heat_data[0].channels[1] = 1 | TPC_US_CLKCNT(2*1000); 使能加热,加热时间为 2ms
*/ -
电机
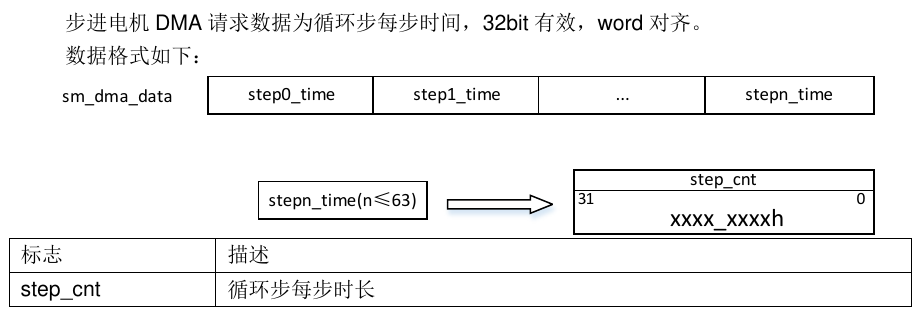
针对这个格式,demo 声明一个数据结构:
unsigned int motor_data[sum];
/*
使用示例:电机为 4 步一圈,然后逐步减速
第一圈的数据:
motor_data[0] = TPC_US_CLKCNT(2*1000); 2ms
motor_data[1] = TPC_US_CLKCNT(3*1000); 3ms
motor_data[2] = TPC_US_CLKCNT(4*1000); 4ms
motor_data[3] = TPC_US_CLKCNT(5*1000); 5ms
第二圈的数据:
motor_data[4] = TPC_US_CLKCNT(6*1000); 6ms
motor_data[5] = TPC_US_CLKCNT(7*1000); 7ms
motor_data[6] = TPC_US_CLKCNT(8*1000); 8ms
motor_data[7] = TPC_US_CLKCNT(9*1000); 9ms
······
*/
4.3 API 接口
以下接口需要包含 libmcu/soc/x2600/include/soc/tpc.h 文件
/*
* @brief 初始化 tpc 控制器
* @param 无参数
* @retval 无
*/
void tpc_init(void);
unsigned int tpc_get_one_us_clks(void);
/*-----------------------------shift lat heat设备单步接口, 用的是普通dma---------------------------------------------------------------------*/
/*
* @brief 初始化移位控制器
* @param config : 移位配置结构体
* @retval 成功返回 0,失败返回其他值
*/
int tpc_shift_init(struct tpc_shift_cfg *config);
/*
* @brief 初始化加热控制器
* @param config : 加热配置结构体
* @retval 成功返回 0,失败返回其他值
*/
int tpc_heat_init(struct tpc_heat_cfg *config);
/*
* @brief 初始化锁存控制器
* @param config : 锁存配置结构体
* @retval 成功返回 0,失败返回其他值
*/
int tpc_latch_init(struct tpc_lat_cfg *config);
/*
* @brief 将移位数据写入 dma 缓存
* @param data : 移位数据存放位置的指针
* @param len : 数据长度
* @retval 返回写入 dma 缓存的数据的长度
*/
int tpc_shift_write_data(unsigned char *data, int len);
/*
* @brief 将加热数据写入 dma 缓存
* @param data : 加热数据存放位置的指针
* @param len : 数据长度
* @retval 返回写入 dma 缓存的数据的长度
*/
int tpc_heat_write_data(unsigned int *data, int len);
/*
* @brief 触发移位,阻塞等待 dma 搬运数据后,开始输出
* @param 无
* @retval 成功返回 0,失败返回错误代码
*/
int tpc_shift_start(void);
/*
* @brief 触发加热,阻塞等待 dma 搬运数据后,开始输出
* @param 无
* @retval 成功返回 0,失败返回错误代码
*/
int tpc_heat_start(void);
/*
* @brief 触发锁存,阻塞等待 dma 搬运数据后,开始输出
* @param 无
* @retval 成功返回 0,失败返回错误代码
*/
int tpc_latch_start(void);
/*
* @brief 用于马上停止移位设备,一般不会用到
* @param 无
* @retval 无
*/
void tpc_shift_quick_stop(void);
/*
* @brief 用于马上停止加热设备,一般不会用到
* @param 无
* @retval 无
*/
void tpc_heat_quick_stop(void);
/*
* @brief 用于马上停止锁存设备,一般不会用到
* @param 无
* @retval 无
*/
void tpc_latch_quick_stop(void);
/*
* @brief 用于注销移位设备
* @param 无
* @retval 成功返回 0,失败返回其他值
*/
int tpc_shift_deinit(void);
/*
* @brief 用于注销加热设备
* @param 无
* @retval 成功返回 0,失败返回其他值
*/
int tpc_heat_deinit(void);
/*
* @brief 用于注销锁存设备
* @param 无
* @retval 成功返回 0,失败返回其他值
*/
int tpc_latch_deinit(void);
/*-----------------------------------------电机接口, 用的是loop dma---------------------------------------------------*/
/*
* loop dma 模式:使用 dma 去循环搬运指定范围数据
* 当采用 loop dma 模式时,所以必须及时喂数据给 dma 缓存,防止喂数据不及时时,打印到错误的数据
*/
/*
* @brief 初始化电机控制器
* @param id : 第几个电机(0,1)
* @param motor : 电机配置结构体
* @retval 成功返回 0,失败返回其他值
*/
int tpc_motor_init(int id, struct tpc_motor_cfg *motor);
/*
* @brief 将电机数据写入 dma 缓存
* @param id : 第几个电机(0,1)
* @param data : 电机数据存放位置的指针
* @param len : 数据长度
* @retval 返回写入 dma 缓存的数据的长度
*/
int tpc_motor_write_data(int id, unsigned int *data, int len);
/*
* @brief 开始电机,阻塞等待 dma 搬运数据后,开始输出
* @param id : 第几个电机(0,1)
* @retval 无
*/
void tpc_motor_start(int id);
/*
* @brief 停止 dma 的数�据搬运,会将 dma 缓存中的数据搬完后停止
* @param id : 第几个电机(0,1)
* @retval 无
*/
void tpc_motor_data_stream_end(int id);
/*
* @brief 停止电机
* @param id : 第几个电机(0,1)
* @param quick_stop:是否立刻停止电机
* quick_stop = 0:不是,等 dma 数据搬完再停止,
* quick_stop = 1: 是,立刻结束 dma 搬运,然后停止电机
* @retval 成功返回 0,失败返回错误代码
*/
int tpc_motor_stop(int id, int quick_stop);
/*
* @brief 注销电机设备
* @param id : 第几个电机(0,1)
* @retval 成功返回 0,失败返回其他值
*/
int tpc_motor_deinit(int id);
/*-----------------------------------------同步模式接口, 用的是 loop dma------------------------------------------------*/
/*
* 当为全自动模式时,下面接口会同时控制移位,锁存,加热,电机运作
* 当为半自动模式时,下面接口会同时控制移位,锁存,加热,电机需要使用上面的接口自己控制
*/
/*
* @brief 初始化自动模式
* @param shift : 移位控制结构体
* @param heat : 加热控制结构体
* @param lat : 锁存控制结构
* @param motor : 电机控制结构
* @param motor_id : 第几个电机(0,1)
* 当 motor != NULL 时为全自自动模式
* 当 motor == NULL 时为半自动模式
* @retval 成功返回 0,失败返回其他值
*/
int tpc_sync_mode_init(struct tpc_shift_cfg *shift, struct tpc_heat_cfg *heat, struct tpc_lat_cfg *lat,
struct tpc_motor_cfg *motor, int motor_id);
/*
* @brief 开始半自动模式,会搬运 shift dma 缓存和 heat dma 缓存中的数据,当为全自动模式时,同时也会搬运
* motor dma 缓存中的数据
* @param 无
* @retval 无
*/
void tpc_sync_mode_start(void);
/*
* @brief 停止 dma 的数据搬运,会将 dma 缓存中的数据搬完后停止
* @param 无
* @retval 无
*/
void tpc_sync_mode_data_stream_end(void);
/*
* @brief 停止打印, 如果为全自动模式,也会停止电机
* @param quick_stop:是否立刻停止打印
* quick_stop = 0:不是,等 dma 数据搬完再停止,
* quick_stop = 1: 是,立刻结束 dma 搬运,然后停止打印
* @retval 成功返回 0,失败返回错误代码
*/
int tpc_sync_mode_stop(int quick_stop);
/*
* @brief 注销设备接口, 如果为全自动模式,也会注销电机
* @param 无
* @retval 成功返回 0,失败返回其他值
*/
int tpc_sync_mode_deinit(void);
5 工作时序讲解
5.1 全自动模式
以下使用的电机为 4 步一个周期,对齐步配置为 4 步。在全自动模式下,加热的触发由电机触发,即电机的第一步开始时和对齐步结束时,会触发加热。所以在全自动模式下,一个电机周期可以有 2 个触发加热的时刻。以下是第一步和对齐步结束为同��一时刻,所以只触发了一次加热。
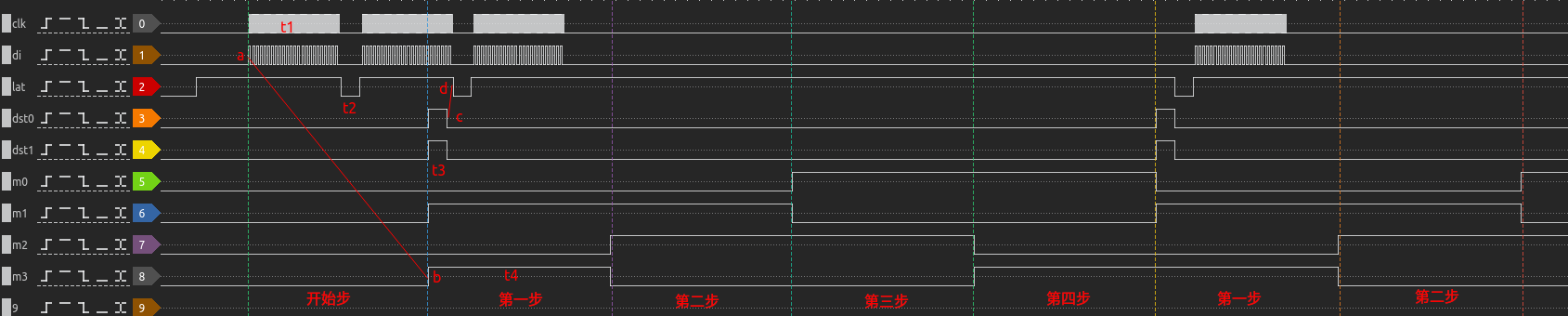
时序讲解:
| 符号 | 含义 |
|---|---|
| t1 | 移位数据输出的 clk,频率可配置,可配置到 50M |
| t2 | 锁存有效时间,可配置 |
| t3 | 加热有效时间,这个决定了可颜色深浅,可配置 |
| t4 | 步进电机每步时间,这个决定了电机的速度,可配置 |
| a -> b | 开始步时间,可配置。对于全自动模式,这个时间需要大于 spi 发送数据的时间 + t2 |
| c -> d | 在全自动模式下,加热完成后就会触发锁存。 |
在全自动模式下,开始发送移位数据时,就进行开始步。移位数据发送完成,锁存后就会发送下一次移位数据,然后等待锁存。
5.2 半自动模式
以下使用的电机为 4 步一个周期。在半自动模式下,加热的触发由锁存触发,即锁存结束后就会触发加热。所以在半自动模式下,需要自己对齐一行数据要走多少步之后才加热。

| 符号 | 含义 |
|---|---|
| t1 | 移位数据输出的 clk,频率可配置,可配置到 50M |
| t2 | 锁存有效时间,可配置 |
| t3 | 加热有效时间,这个决定了可颜色深浅,可配置 |
| t4 | 步进电机每步时间,这个决定了电机的速度,可配置 |
| a -> b | 开始步时间,可配置。对于半自动对齐模式,这个时间需要 为 spi 发送数据的时间 + t2,这样可以与第一次加热对齐。 因为在在半自动模式下,加热的触发由锁存触发。 |
| c -> d | 对于半自动模式,可配置加热后触发锁存时间,用来手动对 齐电机,即对齐一行的数据。上面配置为电机走过一行的时 间(4步一行)- t2 - t3。即当下一次锁存完成后,触发加热, 时间刚好为电机这边开始第一步的时间。即新的一行的时间。 |
在半自动模式下,电机自己控制什么时候开始。
5.3 手动控制模式
以下使用的电机为 4 步一个周期。在手动控制模式下,所有动作均为自己触发。但是电机在第一次触发后,直到打印结束才能停。电机可以设置在电机周期内的第几步产生中断,然后在中断回调函数里面触发移位,在移位完成中断回调里面触发锁存,在锁存完成中断回调里面触发加热,如此完成一行数据的打印。
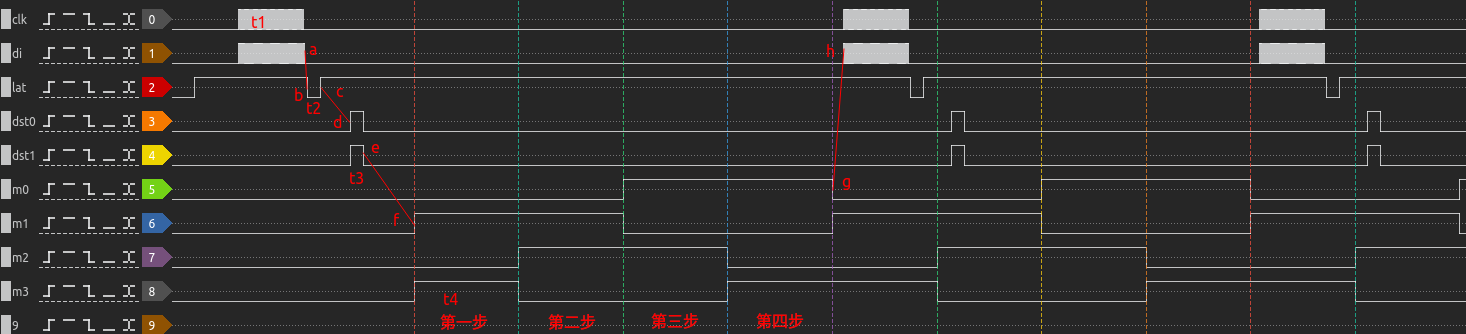
| 符号 | 含义 |
|---|---|
| t1 | 移位数据输出的 clk,频率可配置,可配置到 50M |
| t2 | 锁存有效时间,可配置 |
| t3 | 加热有效时间,这个决定了可颜色深浅,可配置 |
| t4 | 步进电机每步时间,这个决定了电机�的速度,可配置 |
| a -> b | 移位完成中断,触发锁存 |
| c -> d | 锁存完成,触发加热 |
| e -> f | 加热完成,触发电机开始步,开始步时间可配 |
| g -> h | 产生中断,触发移位,开始新的一行数据发送 |
6 重要提示
6.1 多通道移位数据
设一点行有 1024 个打印点,以下为不同通道数的数据传输示意图。
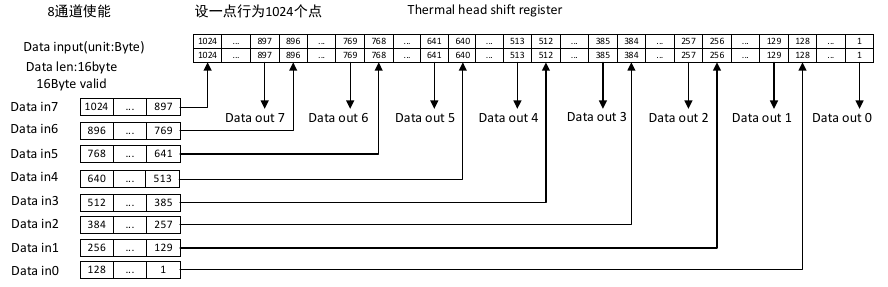
8 数据通道打印头,每个移位寄存器的位数为 128bit,每个通道的数据存储单位为字节,输出数据的长度相等。每个通道的数据输出长度为 16 字节,有效数据长度为 16 字节。
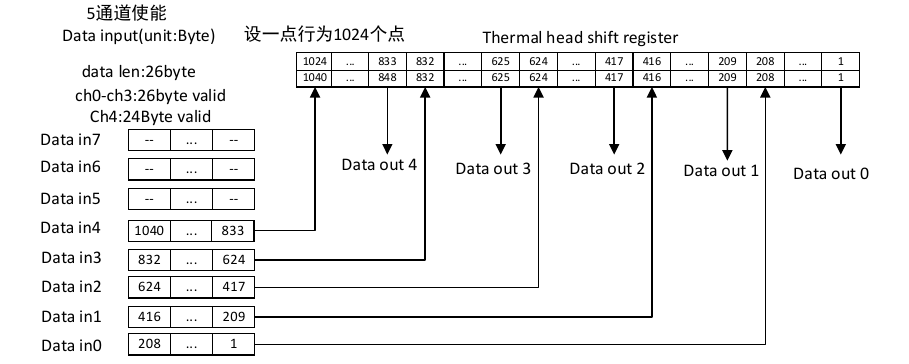
5 数据通道打印头,设通道 0~通道 3 为 208bit, 通道 4 为 192bit,每个通道的数据存储单位为字节, 输出数据的长度相等。那么通道 0 ~ 通道 4 数据输出长度为 26 字节,通道 0~通道 3 有效数据长度为 26 字节,通道 4 有效数据长度为 24 字节,通道 4 中无效数据先行输出。
6.2 多通道加热,但是打印机的功率只支持同一时间只有一个加热通道
采用假加热模式。
在加热的 dma 数据格式里面,可以设置本次加热是否使能加热信号,如下:
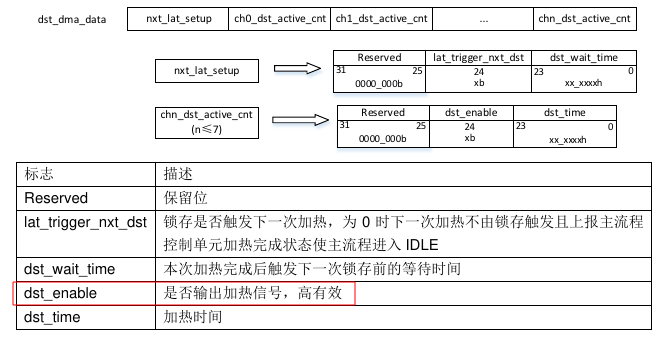
所以我们可以将同一行数据进行多次传输,每次只加热一个通道。例如:
当打印机是 2 个加热通道,4 步一行。则可以设置为 2 步一行,将一行数据进行两次传输,第一次加热左通道,第二次加热右通道。
6.3 align_step 讲解
在全自动模式下,电机配置结构体中的 align_step 成员就起效果了,它可以让全自动模式下的一个电机周期内有两个加热时刻,也就是一个周期内可以打印两行。例如:
一个 8 步(0 到 7)为一周期的电机,在全自动模式,将 align_step 设置为 4,则电机会在第 0 步打印一行数据,在第 4 步打印一行数据。