X2000 GPIO使用
1 GPIO配置方法
打开iconfigtool,选择x2000_darwin_factory_defconfig 文件
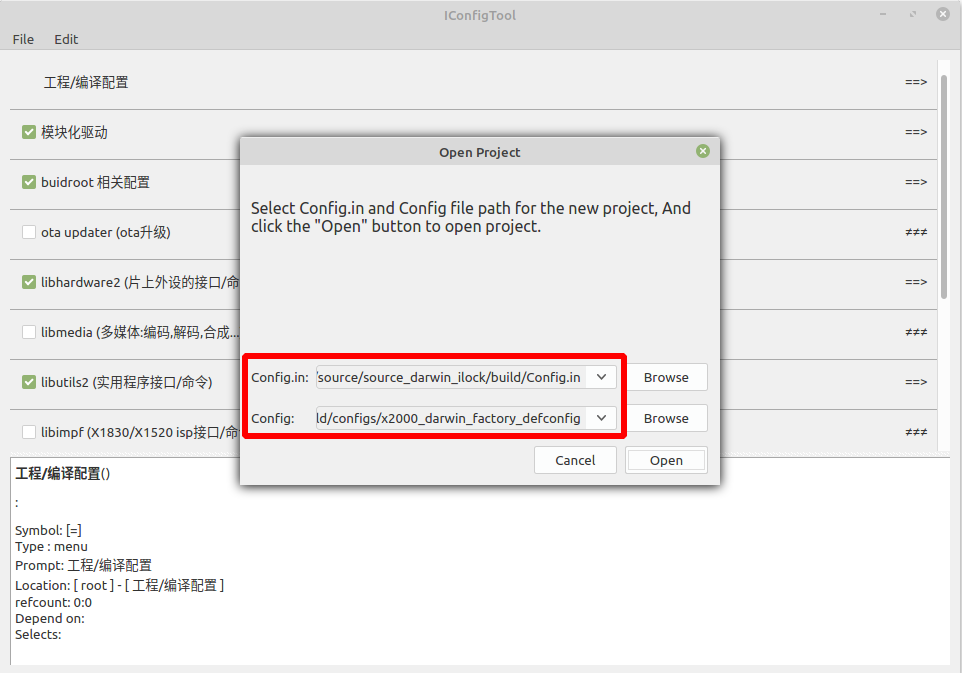
点击Open打开
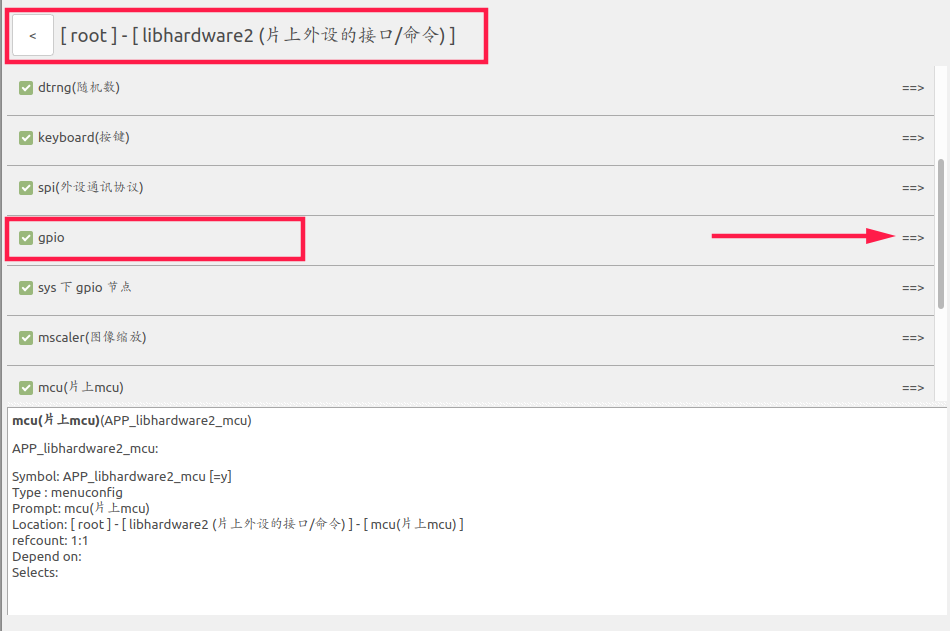
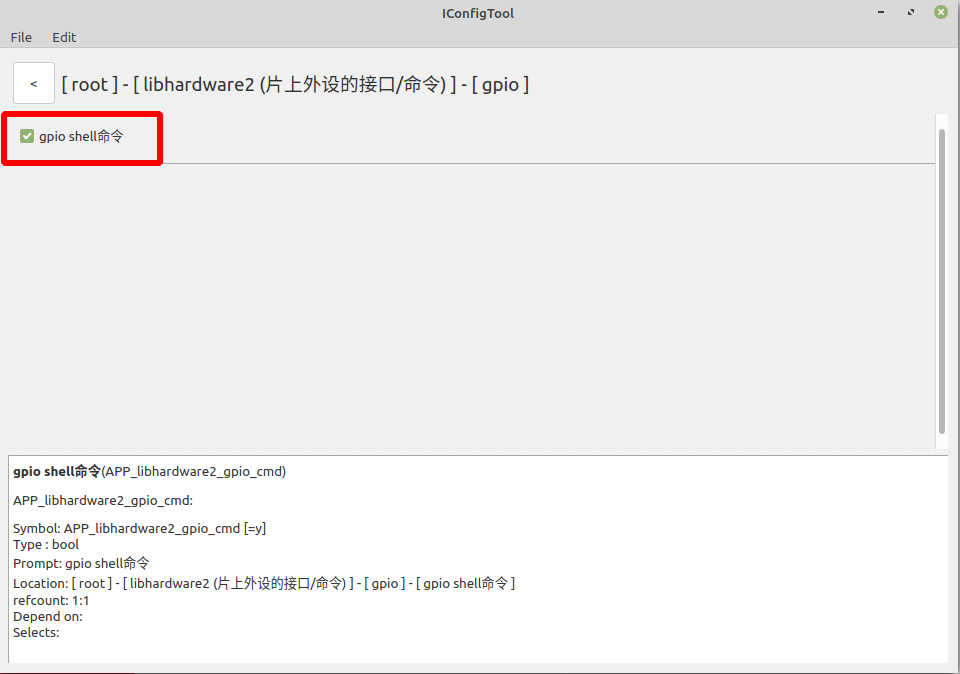
进入libhardware2, 选择gpio并勾选gpio shell命令, 为接下来操作gpio做准备
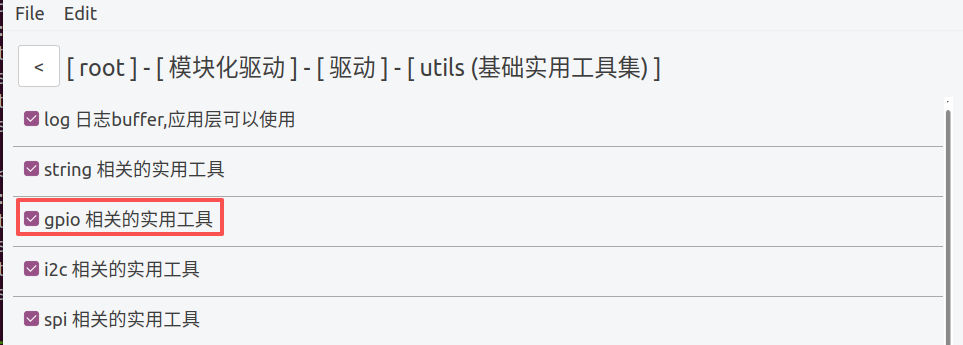
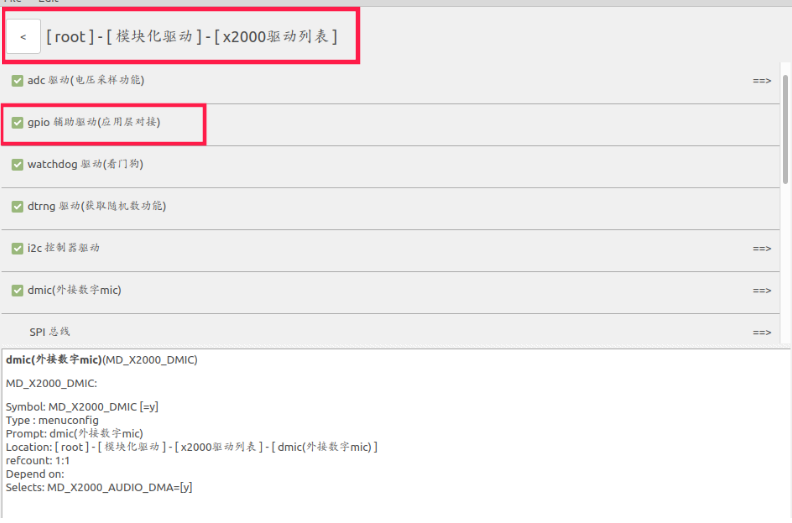
进入模块化驱动,选择x2000驱动列表,勾选gpio辅助驱动,将gpio驱动编译进工程
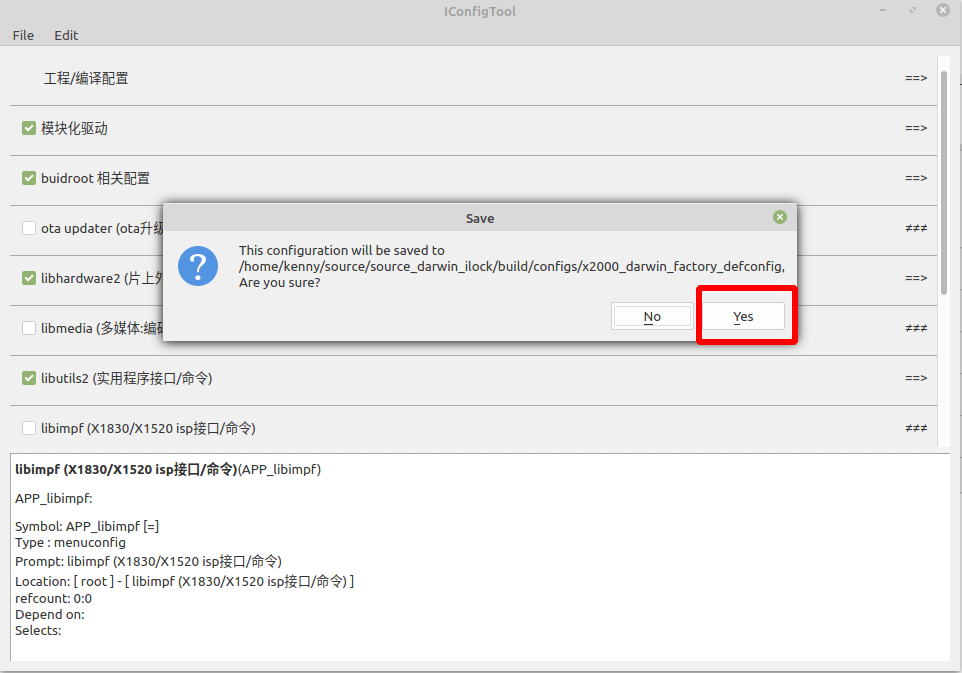
点击 File->Save 保存配置以后,进行编译和烧录。
编译命令如下:
build$ make x2000_darwin_factory_defconfig
build$ make
烧录可以参考, 烧录方法
2 GPIO shell 调试
2.1 shell命令
cmd_gpio set_func <GPIO> <FUNC>
功能:设定指定IO功能
参数:GPIO //IO⼝的名字
FUNC //IO的功能
example:cmd_gpio set_func PB28 func0
cmd_gpio get_func <GPIO>
功能:获取指定IO功能状态
参数:GPIO //IO的名字
example:cmd_gpio get_func PB28
cmd_gpio get_value <GPIO>
功能:获取IO电平
参数:GPIO //IO的名字
example:
cmd_gpio get _value PB28
2.2 具体例子
运用shell命令2000_darwin板子关灯
由原理图可知,灯光控制引脚为pc09,默认拉高,人为拉低实现关灯,具体案例如下:cmd_gpio get_func pc09 //获取pc09的功能与状态
输出结果:
output1 pull_up //此时状态为上拉,输出高电平
cmd_gpio get_value pc09 //获取pc09电平值
输出结果:
1 //证明此刻pc09为高电平,板子上led灯为亮
cmd_gpio set_func pc09 output0 //将pc09功能设置为输出低电平,观察板子,led灯灭
输出结果:
无任何输出
cmd_gpio get_func pc09 //再次获取pc09的功能与状态,与之前设置比较
输出结果:
output0 pull_up //此时输出低电平
3 GPIO应用接口分析
3.1 API详细介绍
使用gpio接口需要包含头文件: #include <libhardware2/gpio.h>
int gpio_open(void)
功能:获取gpio设备操作句柄
参数:
无
返回值:
成功:gpio设备句柄
失败:负数
int gpio_close(int fd)
功能:关闭gpio设备句柄
参数:
fd //gpio设备句柄,由gpio_open()函数获得
返回值:
成功:0
失败:负数
int gpio_set_func(int fd, const char *gpio, char *funcs[], unsigned int func_count)
功能:设置gpio功能
参数:
fd //gpio设备句柄,由gpio_open()函数获得
gpio //描述对应的gpio引脚,如"PB08"
funcs //描述对应的gpio引进功能
func_count //funcs 数组的长度,即一次设置的功能个数
返回值:
成功:0
失败:负数
int gpio_get_func(int fd, const char *gpio, char *buf, int buf_size)
功能:获得gpio当前的功能
参数:
fb //gpio设备句柄,由gpio_open()函数获得
gpio //描述对应的gpio引脚,如"PB08"
buf //缓冲区,用于获取gpio的功能(一个buf存放所有功能)
buf_size //给定的buf的大小
返回值:
成�功:0
失败:负数
int gpio_get_func2(int fd, const char *gpio, char *buf[], int buf_count, int buf_size)
功能:获得gpio当前的功能,此函数数与 gpio_set_func 相对应
参数:
fd //gpio设备句柄,由gpio_open()函数获得
gpio //描述对应的gpio引脚,如"PB08"
buf //buf 数组,每个成员作为一个buf获取gpio的一个功能(与gpio_get_func的区别)
buf_count //数组中成员的个数,即buf的个数
buf_size //buf 数组中每个buf的大小,每个buf大小都一样大
返回值:
成功:获取到的个数
失败:负数
int gpio_get_value(int fd, const char *gpio)
功能:获得gpio输入的值
参数:
fd //gpio设备句柄,由gpio_open()函数获得
gpio //描述对应的gpio引脚,如"PB08"
返回值:
成功:0或1
失败:负数
int gpio_get_help(int fd, char *buf, unsigned int buf_size)
功能:获得gpio的帮助信息
参数:
fd //gpio设备句柄,由gpio_open()函数获得
buf //用于获取gpio的帮助信息
buf_size //给定的buf的大小
返回值:
成功:0或1
失败:负数
3.2 具体例子
运用接口实现x2000_darwin板子关灯
由原理图可知,灯光控制引脚为pc09,默认拉高,人为拉低实现关灯,具体案例如下:int main(int argc, char *argv[])
{
int fd, ret;
char *func[] = {"output0", "pull_up"}; //要设置的功能名
char *gpio = "pc09"; //要设置的引脚名
char buf[256];
fd = gpio_open(); //打开gpio
if (fd < 0) {
fprintf(stderr, "failed to open device\n");
exit(-1);
}
ret = gpio_get_value(fd, gpio); //得到gpio的电平值
fprintf(stderr, "the value of %s is %d\n", gpio, ret);
ret = gpio_set_func(fd, gpio, func, 2); //设置gpio功能,这里设置为输出0,已达到关灯的目的
if (ret)
fprintf(stderr, "failed to set func\n");
ret = gpio_get_func(fd, gpio, buf, sizeof(buf));//得到gpio功能,可以比较一下是否与设置一致
if (!ret)
fprintf(stderr, "%s\n", buf);
gpio_close(fd); //关闭gpio
}
4 在kernel中使用GPIO
4.1 kernel中的GPIO相关API详细介绍
4.1.1 申请与释放gpio
int gpio_request(unsigned gpio, const char *label)
功能:申请gpio
参数:
gpio //gpio引脚
label //描述gpio引脚
返回值:
成功:0
失败:负数
void gpio_free(unsigned gpio)
功能:注销gpio
参数:
gpio //gpio引脚
返回值:
无
4.1.2 获取与设置gpio端口电平
int gpio_get_value(unsigned gpio)
功能:获取gpio电平大小
参数:
gpio //gpio引脚
返回值:
成功:0
失败:负数
void gpio_set_value(unsigned gpio, int value)
功能:设置gpio电平大小
参数:
gpio //gpio引脚
value //引脚电平大小
返回值:
无
4.1.3 设置gpio端口方向与电平
int gpio_direction_output(unsigned gpio, int value)
功能:设置gpio输出电平大小
参数:
gpio //gpio引脚
value //引脚电平大小
返回值:
成功:0
失败:负数
int gpio_direction_input(unsigned gpio)
功能:设置gpio为输入
参数:
gpio //gpio引脚
返回值:
成功:0
失败:负数
4.1.4 gpio功能设置
#include<soc/gpio.h> //包含此结构体
enum gpio_function { //gpio功能枚举,提供给gpio功能设置函数使用
GPIO_FUNC_0 = 0x10,
GPIO_FUNC_1 = 0x11,
GPIO_FUNC_2 = 0x12,
GPIO_FUNC_3 = 0x13,
GPIO_OUTPUT0 = 0x14,
GPIO_OUTPUT1 = 0x15,
GPIO_INPUT = 0x16,
GPIO_INT_LO = 0x18,
GPIO_INT_HI = 0x19,
GPIO_INT_FE = 0x1a,
GPIO_INT_RE = 0x1b,
GPIO_INT_MASK_LO = 0x1c,
GPIO_INT_MASK_HI = 0x1d,
GPIO_INT_MASK_FE = 0x1e,
GPIO_INT_MASK_RE = 0x1f,
GPIO_PULL_HIZ = 0x80,
GPIO_PULL_UP = 0xa0,
GPIO_PULL_DOWN = 0xc0,
};
int jzgpio_set_func(int port, enum gpio_function func, unsigned long pins)
功能:设置gpio功能
参数:
port //gpio引脚组别
func //描述gpio引脚功能
pins //gpio引脚
返回值:
成功: 0
失败:负数
4.1.5 gpio当作中断口使用
int gpio_to_irq(unsigned int gpio)
功能:将gpio端口号转换为相印的中断值
参数:
gpio //gpio号
返回值:
成功:相应的中断值
失败:负数
int request_irq(unsigned int irq, irq_handler_t handler, unsigned long flags,
const char *name, void *dev)
功能:申请中断
参数:
irq //中断号,由gpio_to_irq函数获得
handler //中断调用的回调函数
frags //中断类型,决定中断出发方式
name //设备驱动程序名称
dev //中断名称,方便区分中断
返回值:
成功: 0
失败:负数
void free_irq(unsigned int irq, void *dev_id)
功能:注销中断
参数:
irq //中断号,由gpio_to_irq函数获得
dev_id //中断名称,方便区分中断
返回值:
无
4.2 具体例子
以下为在kernel中使用gpio,通过观察led灯光情况,从而理解gpio的使用:4.2.1 正常情况下使用gpio
#include <linux/module.h>
#include <linux/init.h>
#include <soc/gpio.h> //其包含将GPIO_PC(9)转换为数字'73'的封装函数
#include <linux/delay.h> //包��含延时函数
#include <linux/gpio.h> //包含gpio相关API
void gpio_test(void) //初始情况为开灯,我们将引脚拉低,关灯,等待两秒,在将引脚拉高开灯
{
int val;
int test_gpio = GPIO_PC(9); //led灯控制引脚为pc09
printk(KERN_ERR "start test\n"); //开始测试
gpio_request(test_gpio, "test gpio"); //申请gpio
gpio_direction_output(test_gpio, 0); //设置gpio为输出,且输出为0,关灯
msleep(2000); //延迟2s,以便观察效果
val = gpio_get_value(test_gpio); //得到led引脚电平值
printk(KERN_ERR "the value of %d is %d\n",test_gpio, val);//将电平值打印
gpio_set_value(test_gpio, 1); //设置led引脚电平值为1,开灯
msleep(2000); //延迟2s,以便观察效果
gpio_set_value(test_gpio, 0); //设置gpio为输出,且输出为0,关灯
gpio_free(test_gpio); //释放申请的gpio
}
static int __init vendor_init(void)
{
printk(KERN_INFO "vendor_init test init\n");
gpio_test();
return 0;
}
static void __exit vendor_exit(void)
{
printk(KERN_INFO "vendor_exit test exit\n");
}
module_init(vendor_init);
module_exit(vendor_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("zhongwan");
MODULE_DESCRIPTION("vendor test");
4.2.2 将gpio口做中断口使用
当按下boot按键时,进入中断,可以观察到串口打印,表示按键次数的奇偶性
#include <linux/module.h>
#include <linux/init.h>
#include <soc/gpio.h>
#include <linux/gpio.h>
#include <linux/workqueue.h>
#include <linux/interrupt.h> //中断相关的头文件
#include <linux/irq.h> //中断相关的头文件
static int test_gpio = GPIO_PE(31); //中断触发引脚为PE31,该脚为wake_up按键引脚
struct delayed_work gpio_delay_work;
void gpio_work_func (struct work_struct *p_work) //按键处理函数
{
static int k = 0;
k++;
if (k%2 != 0)
printk(KERN_ERR "An odd number of irq\n"); //奇数次中断
else
printk(KERN_ERR "An even number of irq\n"); //偶数次中断
}
irqreturn_t test_gpio_handle(int irq, void *dev)
{
schedule_delayed_work(&gpio_delay_work, msecs_to_jiffies(0));//��将按键函数延时执行,消抖处理
return 0;
}
void gpio_irq_test(void)
{
char *dev = "gpio"; //程序名称
char *name = "gpio_driver"; //中断名称,方便区分中断
int irq; //irq为中断标号
printk(KERN_ERR "start test\n"); //开始测试
irq = gpio_to_irq(test_gpio); //将gpio端口号转换为相印的中断值
request_irq(irq, test_gpio_handle, IRQF_TRIGGER_RISING, name, dev);//申请中断
}
static int __init vendor_init(void)
{
printk(KERN_INFO "vendor_init test init\n");
INIT_DELAYED_WORK(&gpio_delay_work, gpio_work_func);//初始化工作队列
gpio_irq_test();
return 0;
}
static void __exit vendor_exit(void)
{
printk(KERN_INFO "vendor_exit test exit\n");
}
module_init(vendor_init);
module_exit(vendor_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("zhongwan");
MODULE_DESCRIPTION("vendor test");