X2000_LibISP使用
Linux 工程下的 libisp 包含了 x2000 平台 camera 经过 ISP 的一些库、API 以及示例代码。其中除了 sensor 出图的基本功能,还有屏幕实时预览、双摄帧同步、多通道预览的功能。
本文将介绍 libisp 的组成、应用以及调用的 API 等。
1 目录组成
├── config.h /* libisp配置的头文件,里面是一些配置的宏定义 */
├── Config.in /* libisp的配置文件 */
├── include /* libisp的头文件 */
│ └── libisp
│ ├── isp.h /* 声明isp.c中定义的函数 */
│ └── isp_tuning.h /* 声明isp_tuning.c中定义的函数 */
├── libisp_cmds.mk /* 编译libisp各个模块的makefile */
├── libisp.mk /* 编译libisp库文件的makefile */
├── Makefile /* 编译整个libisp的Makefile */
├── README /* libisp说明文本 */
├── src /* 源代码 */
│ ├── cmds /* Camera shell命令cmd_isp的主函数 */
│ ├── demo /* Camera shell命令的各类demo */
│ └── lib /* Camera shell命令cmd_isp的库函数,通过ioctl与驱动通信 */
└── tools
-
libisp/src/cmds
├── cmds
│ ├── isp_main.c /* Camera shell命令 cmd_isp 的主函数 */
│ └── nv12_rotate_example.c /* NV12 旋转示例
* 该文件不参与编译, 可复制到 isp_main.c 测试功能 */ -
libisp/src/demo
├── demo
│ ├── demo_frame_sync.c /* isp shell命令 demo_frame_sync 的源码 */
│ ├── demo_isp.c /* isp shell命令 demo_isp 的源码 */
│ ├── demo_isp_h264_encode.c /* isp shell命令 demo_isp_h264_encode 的源码 */
│ ├── demo_isp_jpeg_encode.c /* isp shell命令 demo_isp_jpeg_encode 的源码 */
│ ├── demo_isp_nv12_preview.c /* isp shell命令 demo_isp_nv12_preview 的源码 */
│ └── demo_mult_chan_preview.c /* isp shell命令 demo_mult_chan_preview 的源码 */ -
libisp/src/lib
└── lib
├── isp.c /* Camera shell命令 cmd_isp 的库函数,通过ioctl与驱动通信 */
└── isp_tuning.c /* ISP图像信号处理
* 主要包含图像效果设置操作,与数据流无关
* 仅作用于效果参数设置及Sensor控制 */
2 ISP 出图流程
2.1 camera 出图方式
x2000 的 camera 模块出图一共有三种方式:
| 方式 | 接口/模块 | 数据流 |
|---|---|---|
| 方式1 | CIM 接口 | DVP / MIPI(0) → CIM → DDR |
| 方式2 | VIC 接口(不通过 ISP ) | DVP / MIPI(0, 1) → VIC(0, 1) →DDR |
| 方式3 | VIC + ISP 模块 | DVP / MIPI(0, 1) → VIC(0, 1) → ISP → Mscaler → DDR |
这些方式可根据图2-1-1来理解,数据流需要过 ISP 的为方式3。
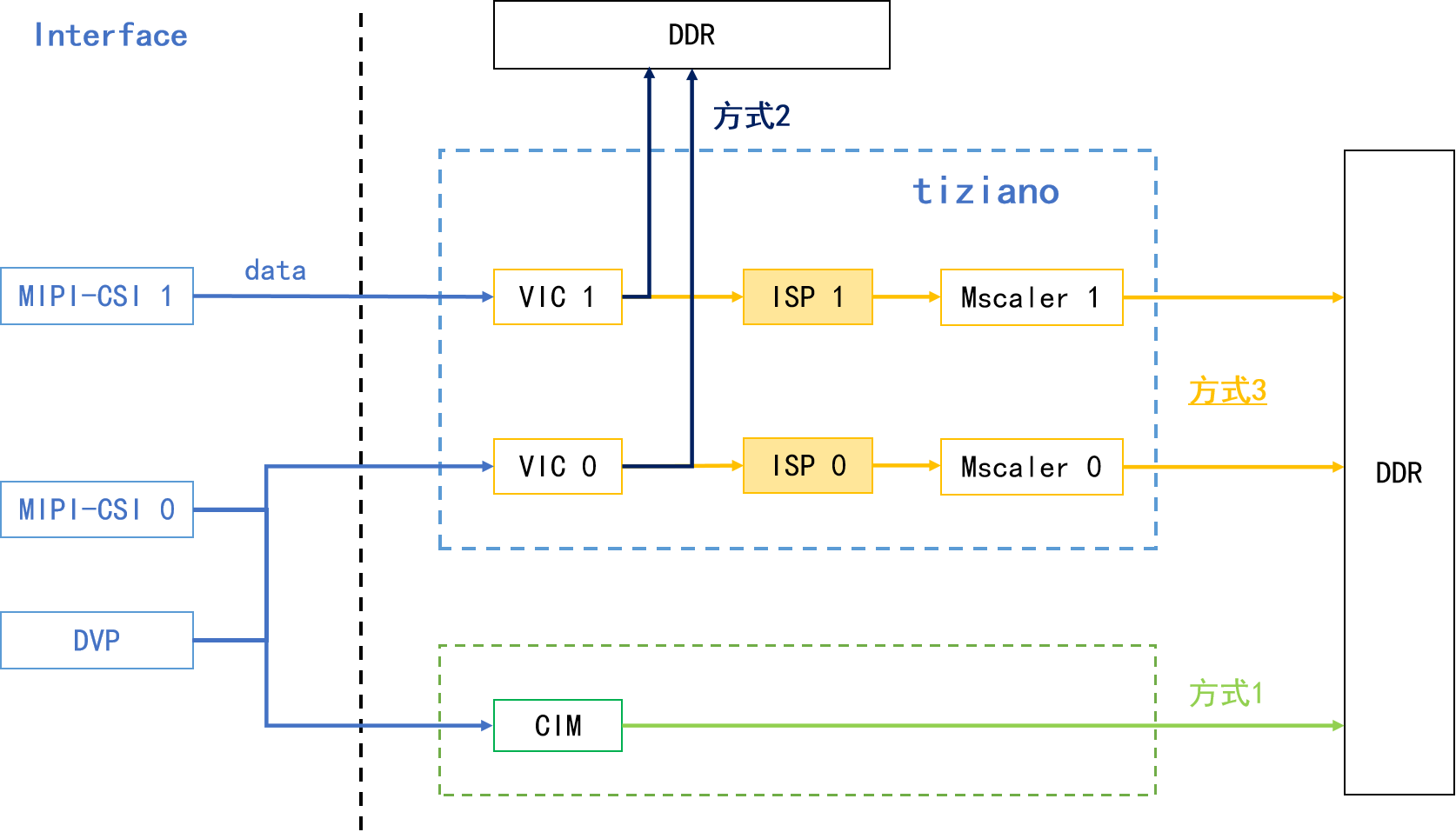
其中,tiziano 为 vic + isp + mscaler 的合称。
其余各组成部分可见下表,简单说明了它们各自的功能。
| 模块名称 | 模块说明 |
|---|---|
| MIPI-CSI | MIPI Camera Serial Interface,MIPI 摄像头串行接口。一种广泛采用的高速相机接口, 采用串行输出方式,主要用于摄像机和主机设备之间的点对点图像和视频传输。 |
| DVP | Digital Video Port,数字视频端口。一种传统的sensor输出接口,采用并行输出方式。 |
| CIM | Camera interface module,摄像头接口模�块。君正 x2000 平台下的CIM支持DVP、 MIPI -CSI接口输入,支持RGB888、RGB565、YCbCr4:2:2 、MONO(8)输入数据格式。 |
| VIC | Video Interface Control,视频接口控制器。君正 x2000 平台下一个视频输入图像 预处理模块,支持DVP、MIPI、BT接口输入,支持RAW8、RAW10、RAW12、 YUV422输入数据格式。 |
| ISP | Image Signal Processing,图像信号处理模块,x2000 isp 最大支持分辨率2048×2048。 |
| Mscaler | Multiple Channel Scaler,多通道缩放器。君正 x2000 平台下用于图像后处理, 包括缩放、裁剪。有3个输出通道,支持输出 NV12、NV21、GREY 数据格式。 |
| DDR | 内存 |
2.1.1 三种出图方式说明
-
方式1:CIM 控制器只能接收来自于 MIPI-CSI 0 或 DVP 接口的 sensor 图像帧数据,并直接送到 DDR。
-
方式2:两个 VIC 控制器输出的数据直接送到 DDR,其中 VIC 0 可接收来自 MIPI-CSI 0 或 DVP 接口的数据,VIC 1 接收的是来自 MIPI-CSI 1 的数据。
-
方式3:VIC 0 和 VIC 1 输出的数据分别通过 ISP 0 和 ISP 1 后,再经过 Mscaler 0/Mscaler 1 到达 DDR。
2.1.2 各种方式的区别
1. camera 接口控制器:VIC 或 CIM
X2000芯片 支持 CIM 与 VIC 两种控制器,它们的主要特性列于表2-1-3.
- VIC控制器:一个视频输入图像预处理模块,对于硬件 DVP / MIPI 接口支持 RAW8、RAW10、RAW12、YUV422 数据输入。 DVP / MIPI 接口输入的 RAW 格式最大支持12bit,DVP 接口输入的 YUV422 格式最大支持 8 bit.
- CIM控制器:通过 DVP 或 MIPI 接口获取数字图像流,支持YCbCr 4:2:2(YUV422), RGB888, RGB565、MONO(8)格式输入,CIM 只能支持 8 bit 数据.
| 控制器 | 支持接口 | 支持输入数据格式 | 支持输出数据格式 | 最大支持分辨率 |
|---|---|---|---|---|
| VIC | DVP , MIPI, BT(暂未调试) | MIPI: RAW8, RAW10, RAW12 DVP: RAW8, RAW10, RAW12, YUV422 (Serial 8bit) BT: YUV422 | RAW8, RAW16, YUV422 (8bit) | MIPI: 8M@30fps, 6M@30fps, 1080p@60fps BT/DVP: 1080p@30fps, 720p@60fps |
| CIM | DVP, MIPI | ITU656, YCbCr 4:2:2, RGB888, RGB565, MONO(8) | YUV422, RGB888, RGB565, MONO | 2047x2047 input and output |
2. 是否经过ISP模块
- VIC 控制器出的数据可过 ISP
- CIM 控制器出的数据不可过 ISP
2.1.3 小结
以上展示了camera 三种出图方式的框架、流程及各方式之间的不同之处。总的来说,一个经过 ISP 的 sensor 出图流程(方式3)为:camera 的图像信息从 MIPI 或 DVP 接口发送,由 vic 控制器决定是否需要经过 isp,如果”是“,则数据送到 isp 模块,最后由 Mscaler 模块缩放后存储到 DDR。
Linux 工程的 libisp 则是一个基于上述流程的 ISP、Video 等多媒体功能的集成,libisp 通过调用模块驱动提供的接口,在应用层上实现 sensor 经过 ISP 的图像输出、保存等操作。
2.2 经过 ISP 的出图流程
2.2.1 Iconfig 配置
根据板级信息、sensor 型号,用 IconfigTool 打开一个工程配置文件(以 x2000_darwin_nand_deconfig 配置 sensor gc2053 为例)。
详细配置流程请查看 开发使用手册/Camera使用以及添加说明文档/Camera_Sensor 通用使用手册.pdf。
需要完成表2-2-1所列的模块配置。
| 配置模块 | 配置说明 |
|---|---|
| sensor | 配置 sensor 的名称、power 引脚、power down 引脚、reset 引脚、 i2c 总线号、i2c 设备地址、sensor 挂接的 vic/cim 总线号 |
| i2c | 配置 I2C 总线号、i2c 时钟引脚、i2c 数据引脚 |
| soc camera | 配置 mclk 引脚、ISP 使能控制、frame buffer 数量 |
| libisp | 启用 x2000 ISP 接口、命令 |
配置过程示例如下:
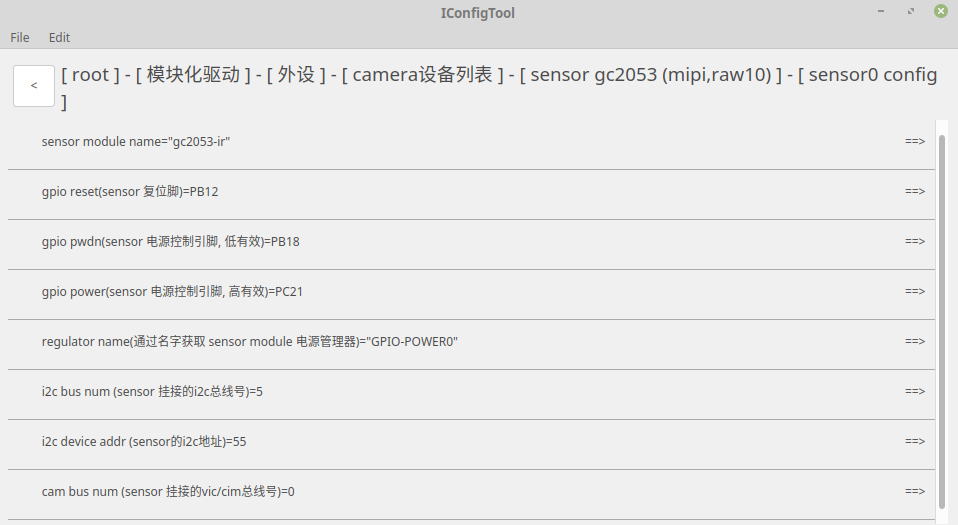
1. 配置 sensor
路径: [root] - [模块化驱动] - [外设] - [camera设备列表] - [sensor gc2053 (mipi, raw10) ] - [sensor0 config]
说明:
- gpio reset 、gpio pwdn、gpio power 要根据电路原理图来选择引脚
- i2c 总线号依据原理图中 sensor 的 SCL, SDA 引脚而填写,i2c bus num 和 gpio 的对应关系在 i2c 模块配置
- i2c device addr 是 sensor 的 i2c 地址,可通过 sensor 的数据手册获得
- cam bus num 是 sensor 挂接的 vic/cim 总线号,可供填写的有 0、1、2,分别对应 VIC0、VIC1、CIM(在 soc camera 模块配置)
注:
- 只开单摄时,gpio power 按照电路原理图配置引脚;
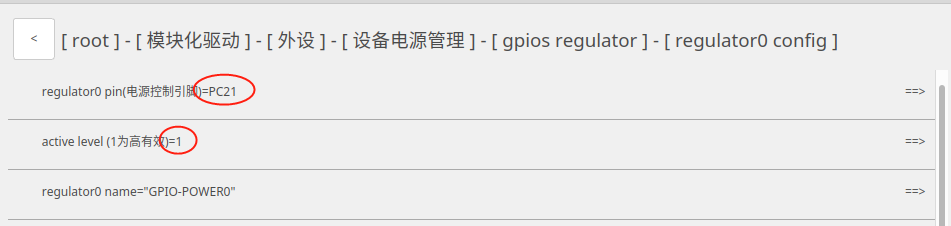
- 开双摄时,若 sensor0、 sensor1的电源引脚相同,则先将 sensor0、sensor1 的 gpio power 都设为 -1,通过名字选择电源管理器(例如:“GPIO-POWER0” 表示 regulator0),随后配置电源管理器的 regulator pin 为 sensor电源引脚;若 sensor0、 sensor1 电源引脚不同,则 gpio power 按照电路原理图配置即可。
例如:开启双摄时
1)将 sensor0 和 sensor1 的 gpio power 都改为 -1;
2)regulator name 都写 “GPIO-POWER0";
3)到电源管理器路径下配置 regulator0 pin、有效电平。
电源管理器路径:[ root ] - [ 模块化驱动 ] - [ 外设 ] - [ 设备电源管理 ] - [ gpios regulator ] - [ regulator0 config ]
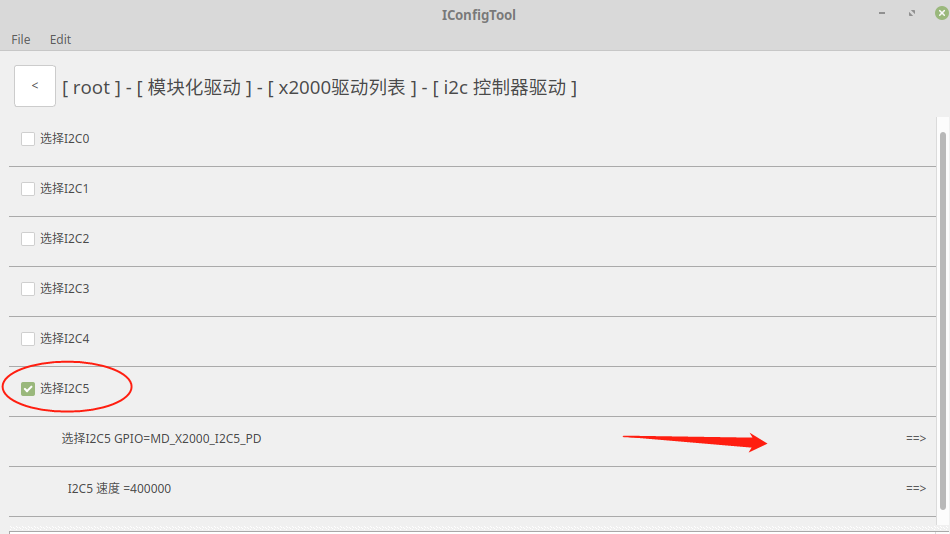
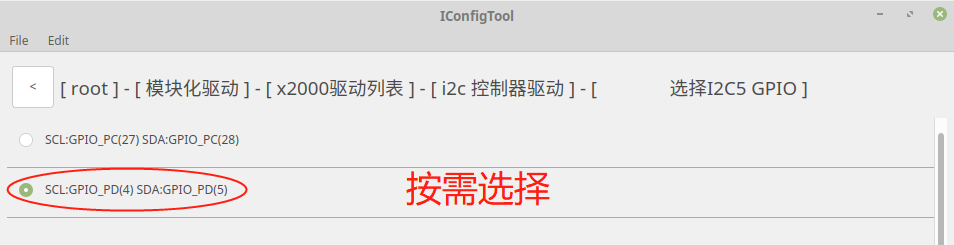
2. 配置 i2c
路径:[模块化驱动] - [X2000驱动列表] - [i2c 控制器驱动]
说明:
- 根据需要选择 I2C 号
- 按照需求,进一步选择GPIO SCL、GPIO SDA组
3. 配置 soc camera(过 ISP )
路径: [root] - [模块化驱动] - [X2000驱动列表] - [camera 驱动(vic/cim控制器)]
说明:
- 开启的vic/cim控制器接口要和sensor配置的"cam bus num"对应:开启VIC0,则cam bus num 写 0;开启VIC1,则cam bus num 写 1;开启CIM,则cam bus num 写 2
- MCLK 引脚根据原理图选择
- 数据通路的选取决定过不过 ISP (选择CIM控制器时无此选项)
- Camera 缓冲帧数一般设为 2(此处配置的缓冲帧数对不通过 ISP 时有效;过 ISP 时,帧缓冲数由libisp 应用代码控制)
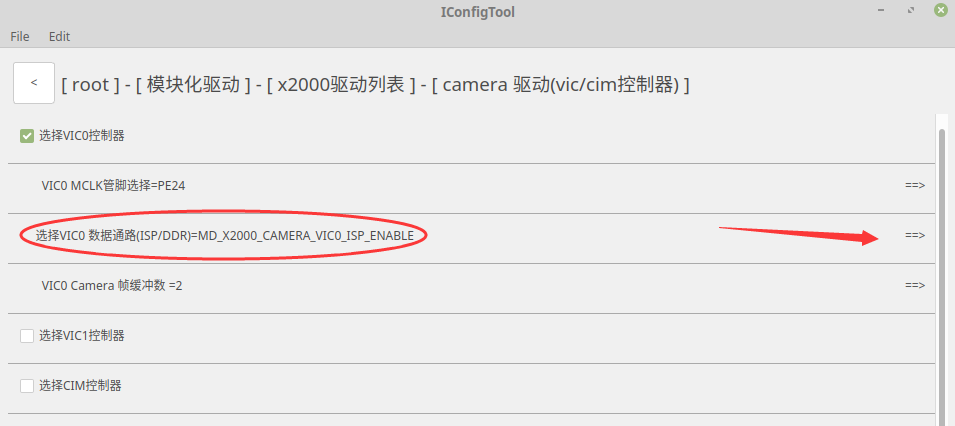
选择“VIC 数据通过ISP模块”。

4. 配置 ISP 接口/命令
路径:[root] - [libisp (X2000 ISP接口/命令) ]
说明:
- 当 vic 控制器选择通过 ISP 模块时,需要勾选 libisp
- 进入libisp,根据需要开启命令、接口


保存配置。
注意:
-
libisp 中的各个接口之间的配置可能有差异,勾选的接口不一定全都能使用,例如demo_isp_nv12_preview 还需要配置屏幕相关驱动等;
-
完成以上配置后,支持的 ISP 接口有:isp shell 命令、demo_isp、demo_isp_jpeg_encode
2.3 libisp 应用
应用须知:选择通过ISP模块时,camera 设备节点名为 mscaler。
- 开启单摄时为 mscaler0 或 mscaler1,对应的是 sensor0 或 sensor1;
- 开启双摄时为 mscaler0 和 mscaler1,分别对应 sensor0 和 sensor1;
- 每个mscaler支持3个 channel,故完整的设备名为 mscalerx-chx.
例如:mscaler0-ch0 表示isp0,通道0的设备节点。
libisp 有基本的 isp 出图接口以及多个模块测试 demo,下表展示各个接口/模块的使用流程和功能简介。
| 接口/模块 | 功能 | 使用流程 |
|---|---|---|
| isp shell 命令 | 1. 摄像头初始化/取消初始化 2. 上电/掉电 3. 开流/关流 4. 获取/丢弃图像帧 | cmd_isp init [device_path] [width=value] [height=value] [frame_nums] [format] cmd_isp power_on [device_path] cmd_isp stream_on [device_path] cmd_isp get_frame [device_path] > [save_path] |
| demo_isp | 持续出图并保存 | demo_isp [device_path] |
| demo_isp_nv12_preview | 1. 屏幕预览 2. 限制帧数的屏幕预览 | 屏幕预览: demo_isp_nv12_preview [device_path] 限制帧数的屏幕预览: demo_isp_nv12_preview [device_path] [frame_conut] |
| mult_chan_preview | 1. 单通道预览 2. 双通道预览 | 单通道: demo_mult_chan_preview [device_path] 双通道: demo_mult_chan_preview [device_path0] [device_path1] |
| frame sync | 双摄帧同步 | demo_frame_sync |
| demo_isp_jpeg_encode | 图像编码为jpeg格式并保存 | demo_isp_jpeg_encode output=[save_path] |
| demo_isp_h264_encode | 图像编码为h264格式并保存 | demo_isp_h264_encode output=[save_path] |
注:demo_isp_nv12_preview 限制帧数的屏幕预览是只预览一定帧数的图像,超过指定帧数就停止预览;jpeg、h264 图像编解码相关内容请参考 开发使用手册/VPU编解码驱动和应用。
2.3.1 camera isp shell 命令
| shell 命令 | 功能 | 使用示例 |
|---|---|---|
| cmd_isp init | 初始化摄像头 | cmd_isp init /dev/mscaler0-ch0 or cmd_isp init /dev/mscaler0-ch0 width=1920 height=1080 frame_nums=3 format=NV12 |
| cmd_isp power_on | 使能 camera 设备,上电 | cmd_isp power_on /dev/mscaler0-ch0 |
| cmd_isp power_off | 关闭 camera 设备,掉电 | cmd_isp power_off /dev/mscaler0-ch0 |
| cmd_isp stream_on | 开始 camera 图像录制 | cmd_isp stream_on /dev/mscaler0-ch0 |
| cmd_isp stream_off | 结束 camera 图像录制 | cmd_isp stream_off /dev/mscaler0-ch0 |
| cmd_isp info | 获取 camera 设备信息 | cmd_isp info /dev/mscaler0-ch0 |
| cmd_isp get_frame | 获取一帧的数据到标准输出 | cmd_isp get_frame /dev/mscaler0-ch0 |
| cmd_isp drop_all_frames | 丢弃已录制的图像数据帧 | cmd_isp drop_all_frames /dev/mscaler0-ch0 |
| cmd_isp deinit | 取消初始化 | cmd_isp deinit /dev/mscaler0-ch0 |
cmd_isp init /dev/mscaler0-ch0 width=1920 height=1080 frame_nums=3 format=NV12
/*初始化, format 是图像输出格式,支持三种输出格式:NV12 NV21 GREY*/
cmd_isp power_on /dev/mscaler0-ch0 /*使能 camera 设备*/
cmd_isp stream_on /dev/mscaler0-ch0 /*打开图像录制*/
cmd_isp get_frame /dev/mscaler0-ch0 > /tmp/frame /*获取图片并保存*/
2.3.2 camera demo isp shell命令
| demo_isp shell 命令 | 功能 | 使用示例 |
|---|---|---|
| demo_isp | 持续出图并保存到 /tmp/frame.nv12 | demo_isp /dev/mscaler0-ch0 |
| demo_isp_nv12_preview | 1. 屏幕预览 2. 限制帧数的屏幕预览 | demo_isp_nv12_preview /dev/mscaler0-ch0 or demo_isp_nv12_preview /dev/mscaler0-ch0 100(只预览100帧) |
| demo_mult_chan_preview | 1. 单通道预览 2. 双通道预览 | 单通道: demo_mult_chan_preview /dev/mscaler0-ch0 双通道: demo_mult_chan_preview /dev/mscaler0-ch0 /dev/mscaler1-ch0 |
| demo_frame_sync | 双摄帧同步 | 使用默认时间戳(15ms)开始帧同步: demo_frame_sync 自定义时间戳(e.g. 21ms)开始帧同步: demo_frame_sync -t 21000 |
| demo_isp_jpeg_encode | 图像编码为jpeg格式并保存 | demo_isp_jpeg_encode output=/tmp/isp.jpeg |
| demo_isp_h264_encode | 图像编码为h264格式并保存 | demo_isp_h264_encode output=/tmp/output |
如果想在电脑端查看图片
(1)将板子*/tmp* 里的图像拉到电脑某路径下
示例:
NV12/NV21/GREY格式:
adb pull /tmp/frame.nv12 /tmp/photo
JPEG格式:
adb pull /tmp/isp.jpeg /tmp/isp.jpeg
H264格式:
adb pull /tmp/output /tmp/output
(2)查看图像
-
NV12/NV21/GREY格式
工具:可用软件 7yuv
设置:图片尺寸与格式信息
表2-3-4 libisp 输出图像格式与 7yuv 对应关系 初始化格式 7yuv Format NV12 YVU420 planer NV12 NV21 YVU420 planer NV21 GREY 8 bpp 示例:若取图初始化为 width=1920 height=1080 format=NV12。则在 7yuv 工具选择格式、分辨率,如下图所示。
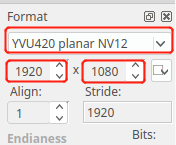
图2-3-1 7yuv工具设置图片格式与分辨率 出图效果:

-
JPEG格式
PC直接双击显示。
-
H264格式
linux 终端进入电脑上图片存放路径,用 ffplay shell 命令打开。
$ ffplay output
3 ISP 接口
3.1 接口结构体
libisp 中主要的isp接口结构体:
| 结构体 | 定义路径 | 说明 |
|---|---|---|
| camera 信息结构体 struct camera_info | /module_driver/include/camera.h | 1. 存放摄像头相关的信息 2. 成员变量通过 ioctl 从模块驱动获取 3. 不可更改 |
| 图像帧信息结构体 struct frame_info | /module_driver/include/camera.h | 1. 存放图像帧的相关等信息 2. 成员变量是通过 ioctl 从模块驱动获取 3. 不可更改 |
| isp 出图属性结构体 struct frame_image_format | /libisp/include/isp.h | 1. 存放输出图片的大小、格式相关信息 2. 可修改结构体的成员变量 |
下面将展开介绍以上结构体。
3.1.1 camera 信息结构体
1. 结构体定义
camera_info 结构体的定义位于:/module_driver/include/camera.h
struct camera_info {
char name[64]; //摄像头名称
unsigned int width; //每行像素数
unsigned int height; //行数
unsigned int fps; //camera 帧率
camera_pixel_fmt data_fmt; //camera 帧数据格式
unsigned int line_length; //一行的⻓度,单位字节
unsigned int frame_size; //一帧数据经过对⻬之前的大小
unsigned int frame_nums; //帧缓冲总数
unsigned long phys_mem; //帧缓冲的物理基地址
void *mapped_mem; //mmap 后的帧缓冲基地址
unsigned int frame_align_size; //帧对⻬大小
};
其中 camera_pixel_fmt 是枚举型的像素格式集合,其定义位于 /module_driver/include/camera_pixel_format.h
2. 用途
camera_info 结构体是用于存放和摄像头相关的信息,其成员变量是通过 ioctl 从模块驱动获取,因此不能更改。
3.1.2 图像帧信息结构体
1. 结构体定义
frame_info 结构体的定义位于:/module_driver/include/camera.h
struct frame_info {
unsigned int index; // 缓存编号
unsigned int sequence; // 帧序列号
unsigned int width; // 帧宽
unsigned int height; // 帧高
unsigned int pixfmt; // 帧的图像格式
unsigned int size; // 帧所占用空间大小
void *vaddr; // 帧的虚拟地址
unsigned long paddr; // 帧的物理地址
unsigned long long timestamp; // 帧的时间戳,单位微秒,单调时间
unsigned int isp_timestamp; // isp时间戳,单位微秒,在vic通过isp clk计数算出
// 最大值10000秒左右(和isp clk相关),大于最大值
// 重新清零计时
unsigned int shutter_count; // 曝光计数
};
2. 用途
frame_info 结构体包含了图像帧的序号、大小、地址、时间戳、计数等信息,用于实现对图像帧的存取、保存、释放,各成员变量是通过 ioctl 从模块驱动获取,因此也不能更改。
3.1.3 isp 出图属性结构体
1. 结构体定义
摄像头出图属性结构体 frame_image_format 的定义位于:/libisp/include/libisp/isp.h
struct frame_image_format {
unsigned int width; //ISP MScaler 输出的宽
unsigned int height; //ISP MScaler 输出的高
unsigned int pixel_format; //ISP MScaler 输出格式
unsigned int frame_size; //ISP MScaler 帧大小
struct channel_scaler scaler; //ISP MScaler 缩放属性
struct channel_crop crop; //ISP MScaler 裁剪属性
int frame_nums; //ISP MScaler 缓存个数,一般写2(驱动+1, 最后申请frame个数是3)
};
其中 ISP MScaler 输出格式 pixel_format 是 /module_driver/include/camera_pixel_format.h 中定义的一部分格式,libisp 仅支持三种输出格式:
CAMERA_PIX_FMT_NV12, // NV12
CAMERA_PIX_FMT_NV21, // NV21
CAMERA_PIX_FMT_GREY, // GREY
缩放与裁剪属性结构体:
struct channel_crop { //裁剪属性
int enable; //裁剪使能
unsigned int top; //裁剪顶部起始
unsigned int left; //裁剪左侧起始
unsigned int width; //裁剪后的宽
unsigned int height; //裁剪后的高
};
struct channel_scaler { //缩放属性
int enable; //缩放使能
unsigned int width; //缩放后的宽
unsigned int height; //缩放后的高
};
2. 用途
frame_image_format 结构体用于设置输出图片的大小、格式,用户根据自身需求,可修改该结构体的成员变量,以选择是否缩放、是否裁剪以及图像最终输出格式。
3. 示例
前提:sensor 原始输出分辨率为 1920×1080。
(1) 输出原始图像大小 (scaler.enable = 0 ;crop.enable = 0)
此时缩放使能、裁剪使能都为0,width 和 height 为原始大小即可,输出大小 output_size = 1920×1080 。
static struct frame_image_format output_fmt = {
.width = 1920,
.height = 1080,
.pixel_format = CAMERA_PIX_FMT_NV12,
.scaler.enable = 0,
.scaler.width = 1920,
.scaler.height = 1080,
.crop.enable = 0,
.crop.top = 0,
.crop.left = 0,
.crop.width = 1920,
.crop.height = 1080,
.frame_nums = 2,
};
(2) 缩放使能 (scaler.enable = 1 ;crop.enable = 0)
在 sensor 原始分辨率1920×1080的基础上缩小到1280 × 720,开启缩放使能,width 和 height 为输出大小, output_size = 1280×720。
sensor(1920×1080) --> scaler(1280×720):
static struct frame_image_format output_fmt = {
.width = 1280,
.height = 720,
.pixel_format = CAMERA_PIX_FMT_NV12,
.scaler.enable = 1,
.scaler.width = 1280,
.scaler.height = 720,
......
};
(3) 裁剪使能 (scaler.enable = 0;crop.enable = 1)
在 sensor 原始分辨率1920×1080的基础上裁剪为640×480,开启裁剪使能。crop.top 和 crop.left 是裁剪时左上角起始位置,crop.width和 crop.height是裁剪的宽高尺寸。 width 和 height 为输出大小, output_size = 640×480。
sensor(1920×1080) --> crop(640×480):
static struct frame_image_format output_fmt = {
.width = 640,
.height = 480,
.pixel_format = CAMERA_PIX_FMT_NV12,
......
.crop.enable = 1,
.crop.top = 100, //裁剪左上角位置(100, 180)
.crop.left = 180,
.crop.width = 640, //裁剪大小(640×480)
.crop.height = 480,
......
};
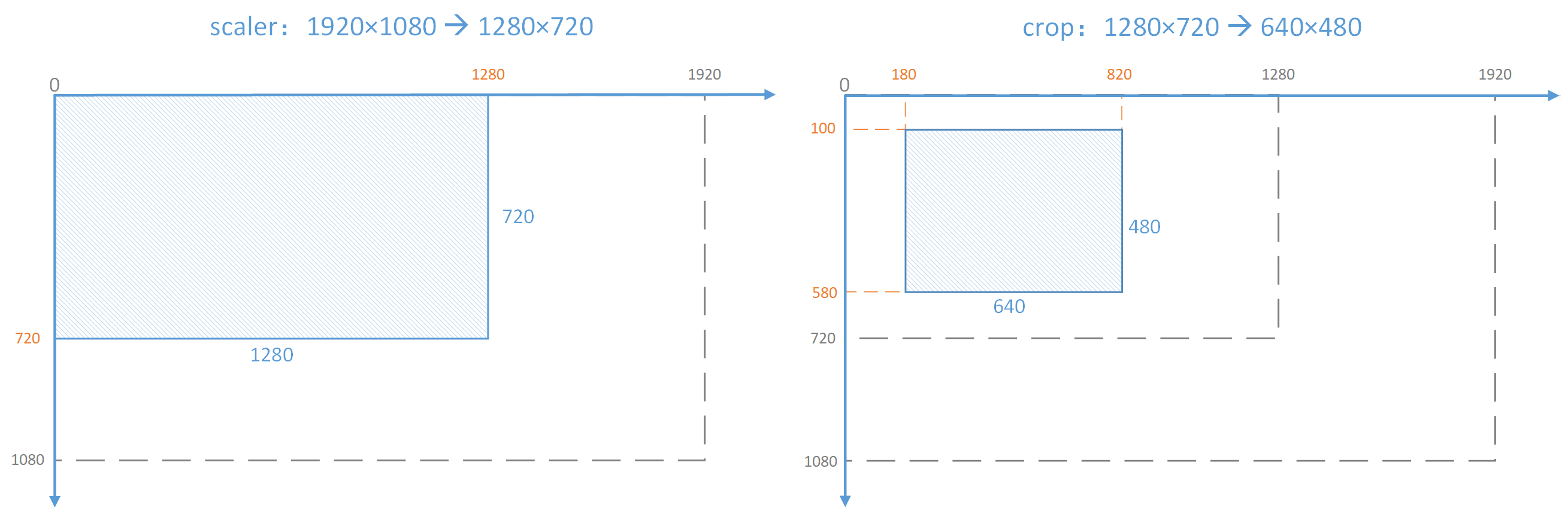
(4)缩放+裁剪 (scaler.enable = 1 ;crop.enable = 1)
缩放、裁剪同时开启时,mscaler 先缩放再裁剪。
在 sensor 原始分辨率1920×1080的基础上先缩小到1280 × 720,再裁剪到 640×480,开启缩放、裁剪使能,width 和 height 为裁剪后的大小, output_size = 640×480。
sensor(1920×1080) --> scaler(1280×720) --> crop(640×480) :
static struct frame_image_format output_fmt = {
.width = 640,
.height = 480,
.pixel_format = CAMERA_PIX_FMT_NV12,
.scaler.enable = 1,
.scaler.width = 1280,
.scaler.height = 720,
.crop.enable = 1,
.crop.top = 100,
.crop.left = 180,
.crop.width = 640,
.crop.height = 480,
......
};
图3-1-1展示了图像先缩放后裁剪的处理过程。
3.1.4 isp 图像缩放算法结构体
1. 结构体定义
mscaler_algo_attr 结构体的定义位于:/libisp/include/libisp/isp.h
struct mscaler_algo_attr {
enum mscaler_algo_mode mode; // 插值算法
struct mscaler_algo_coef avg_coef; // 均值插值系数
};
其中插值算法和均值插值系数:
enum mscaler_algo_mode { // 插值算法
MSCALER_ALGO_AVG, // 均值插值
MSCALER_ALGO_BICUBIC, // 双三次插值
};
struct mscaler_algo_coef { // 均��值插值系数
short pw1, pw2, pw3, pw4; // 四个像素的权重(和为512)
};
注:一般放大和轻微缩小双三次插值效果好,缩小较多均值插值效果好。
2. 用途
当缩放使能打开,默认使用均值插值算法(由模块驱动实现);也可指定双三次插值,在摄像头 stream_on 后调用 isp scale 接口函数 :
int isp_set_scale_algo(int fd, struct mscaler_algo_attr *attr);
3.2. isp接口函数
libisp/src/lib 下的 isp.c 定义了多个接口函数。
-
设备开、关
-
isp 输出信息
-
获取 sensor 信息
-
buffer 申请、映射
-
camera 使能、开流
-
isp 图像帧处理
-
sensor 寄存器
-
设置 scale 算法
-
isp 输出图像大小
……
具体使用请查看 isp.c 及其头⽂件的函数注释。
3.2.1 设备开、关
| 函数定义 | 函数说明 |
|---|---|
| int isp_open(const char* device_path) | 获取 camera 设备句柄 |
| int isp_close(int fd, struct camera_info *info) | 关闭 camera 设备句柄 |
3.2.2 isp 输出信息
| 函数定义 | 函数说明 |
|---|---|
| int isp_set_format(int fd, struct frame_image_format *fmt) | 设置输出信息、分辨率、buffer 个数等 |
| int isp_get_format(int fd, struct frame_image_format *fmt) | 获取输出信息,,frame_size (未 PageSize 对齐)等 |
3.2.3 获取 sensor 信息
| 函数定义 | 函数说明 |
|---|---|
| int isp_get_info(int fd, struct camera_info *info) | 获得输出 camera 经过 ISP、Mscaler 的 sensor 信息 |
| int isp_get_sensor_info(int fd, struct camera_info *info) | 获得输出 camera 未经过 ISP 的原始 sensor 信息 |
3.2.4 buffer 申请、映射
| 函数定义 | 函数说明 |
|---|---|
| int isp_requset_buffer(int fd, struct frame_image_format *fmt) | 申请帧 buffer |
| int isp_free_buffer(int fd) | 释放帧 buffer |
| int isp_mmap(int fd, struct camera_info *info) | 获得输出 camera 映射地址 |
3.2.5 camera 使能、开流
| 函数定义 | 函数说明 |
|---|---|
| int isp_power_on(int fd) | 使能 camera 设备, 上电 |
| int isp_power_off(int fd) | 关闭 camera 设备, 掉电 |
| int isp_stream_on(int fd) | 开始 camera 图像录制 |
| **int isp_stream_off(int fd) ** | 结束 camera 图像录制 |
3.2.6 isp 图像帧处理
| 函数定义 | 函数说明 |
|---|---|
| *void isp_wait_frame(int fd) | 获取一帧录制的图像数据(未获取有效数据继续等待3s) |
| *void isp_get_frame(int fd) | 获取一帧录制的图像数据(不等待) |
| *int isp_put_frame(int fd, void mem) | 释放一帧图像缓冲区 |
| *int isp_dqbuf_wait(int fd, struct frame_info frame) | 获取一帧录制的图像数据(未获取有效数据继续等待3s) |
| *int isp_dqbuf(int fd, struct frame_info frame) | 获取一帧录制的图像数据(不等待) |
| *int isp_qbuf(int fd, struct frame_info frame) | 释放一帧图像 |
| int isp_get_avaliable_frame_count(int fd) | 获取已录制的图像数据帧的数目 |
| int isp_drop_frames(int fd, unsigned int frames) | 在驱动中丢弃已缓存的图像数据帧 |
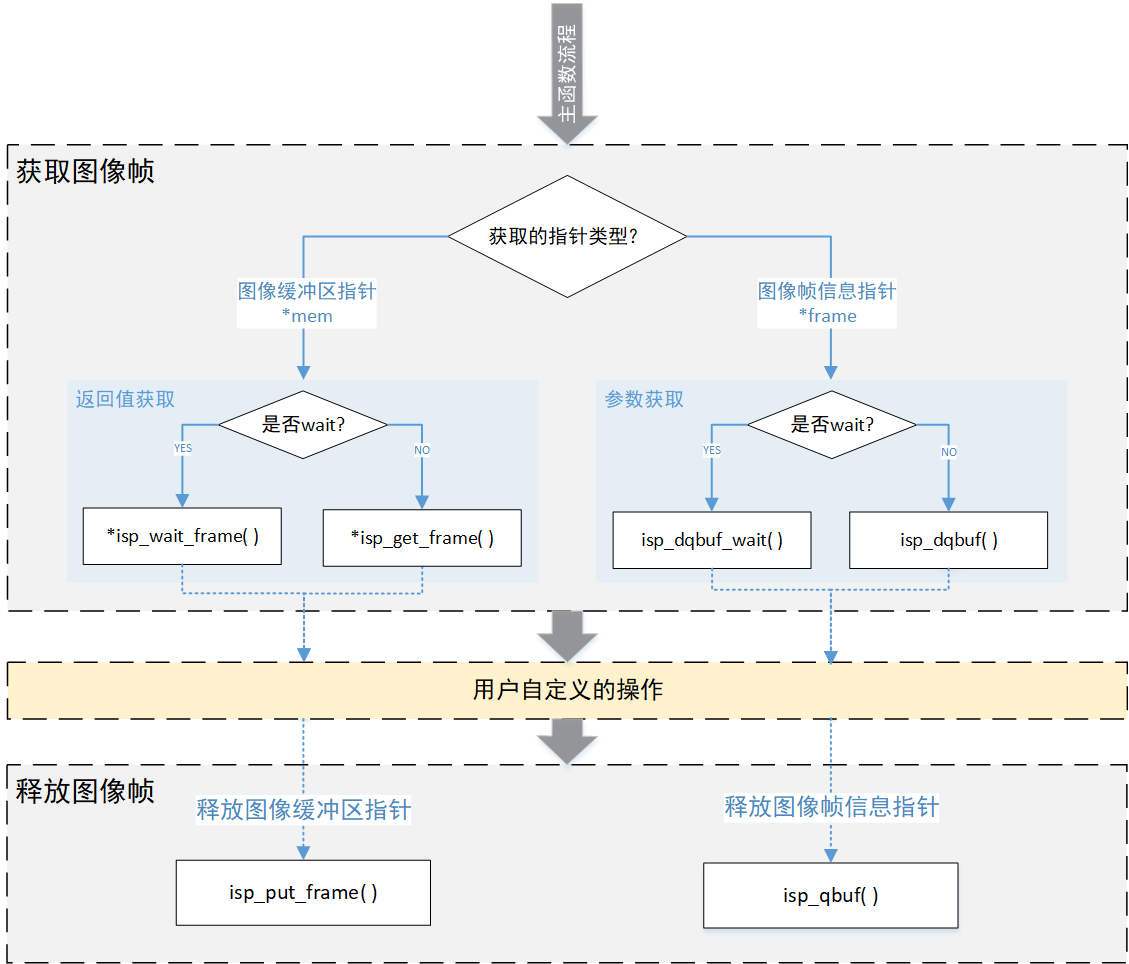
其中,获取图像帧(等待)的接口函数有 isp_wait_frame、isp_dqbuf_wait;获取图像帧(不等待)的接口函数有 isp_get_frame、isp_dqbuf;释放图像帧的的接口函数有 isp_put_frame、isp_qbuf,它们两两之间功能相似、用法不一致。
下方表格列出了它们在使用上的差异,有获取操作就要有对应的释放操作,获取和释放的指针类型要一致。
| 获取/释放图像帧接口函数(等待) | 区别 |
|---|---|
| *isp_wait_frame( ) isp_put_frame( ) | 获取图像缓冲区指针 释放图像缓冲区指针 |
| isp_dqbuf_wait( ) isp_qbuf( ) | 获取帧信息指针 *frame 释放帧信息指针 *frame |
| 获取/释放图像帧接口函数(不等待) | 区别 |
|---|---|
| *isp_get_frame( ) isp_put_frame( ) | 获取图像缓冲区指针 释放图像缓冲区指针 |
| isp_dqbuf( ) isp_qbuf( ) | 获取帧信息指针 *frame 释放帧信息指针 *frame |
总结这些接口函数的区别主要是:
- 要获取的指针是图像缓冲区指针 *mem 还是图像帧信息指针 *frame;
- 是否需要等待(wait)。
图像帧的操作相关接口函数使用亦可通过图3-2-1所示内容理解:
3.2.7 sensor 寄存器
| 函数定义 | 函数说明 |
|---|---|
| int isp_get_sensor_reg(int fd, struct sensor_dbg_register *reg) | 获取 sensor 寄存器 |
| int isp_set_sensor_reg(int fd, struct sensor_dbg_register *reg) | 设置 sensor 寄存器 |
3.2.8 设置 scale 算法
| 函数定义 | 函数说明 |
|---|---|
| int isp_set_scale_algo(int fd, struct mscaler_algo_attr *attr) | 设置 mscaler 缩放参数 |
3.2.9 isp 输出图像大小
| 函数定义 | 函数说明 |
|---|---|
| int isp_get_max_scaler_size(int fd, int *width, int *height) | 获得 ISP scaler 的最大尺寸 |
| int isp_get_line_align_size(int fd, int *align_size) | 获得 ISP 行对齐大小,单位:像素 |
3.3 isp接口使用流程
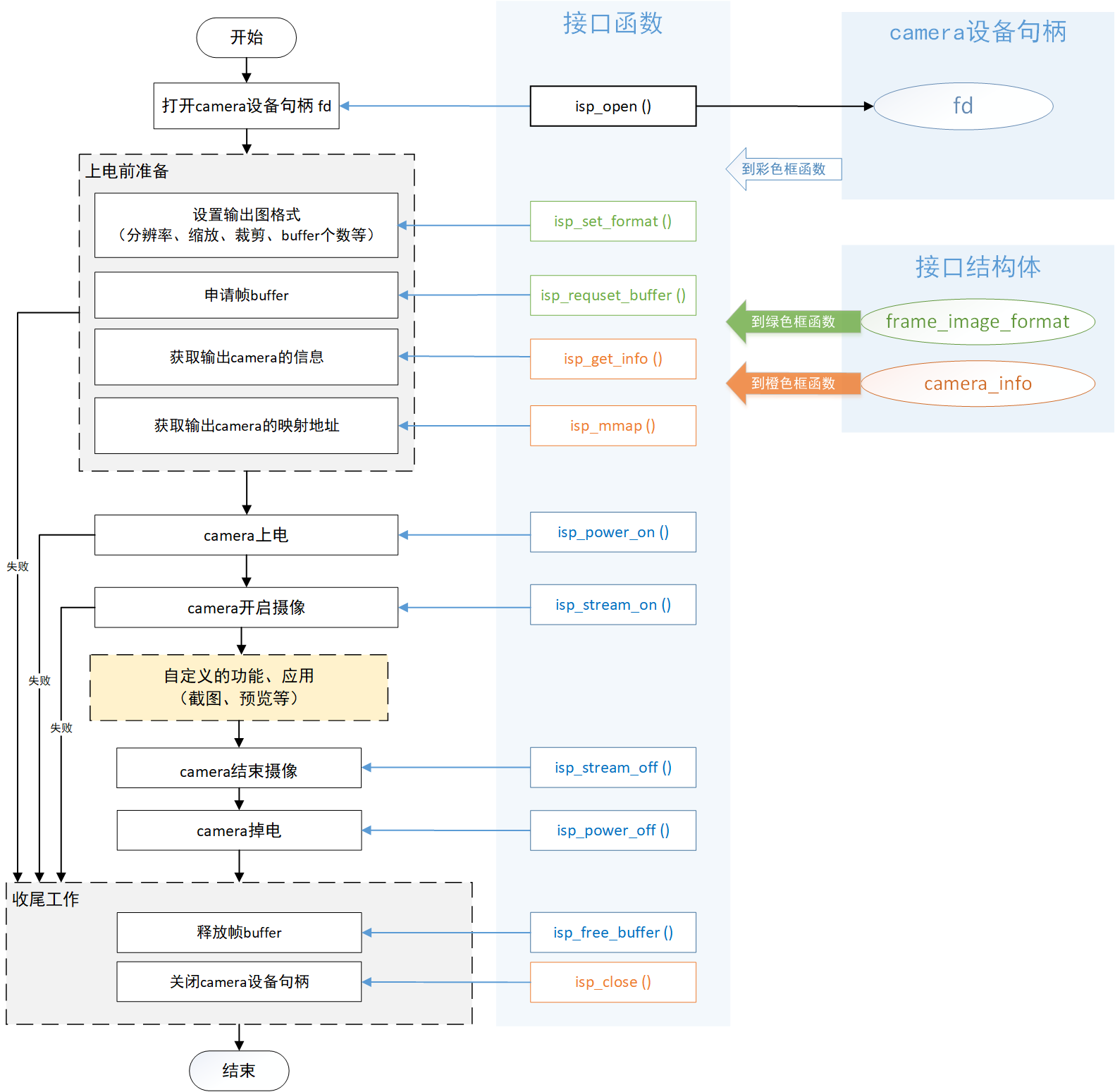
以上 isp 接口结构体、isp 接口函数的基本使用流程如下:
int dev_fd;
struct camera_info info;
struct frame_image_format output_fmt = {
......
};
int main()
{
int ret = 0;
int fd = isp_open("device_path");
if (fd == -ENODEV)
return -ENODEV;
dev_fd = fd;
ret = isp_set_format(fd, &output_fmt);
if (ret < 0) {
close(fd);
return ret;
}
ret = isp_requset_buffer(fd, &output_fmt);
if (ret < 0) {
close(fd);
return ret;
}
isp_get_info(fd, &info);
ret = isp_mmap(fd, &info);
if (ret < 0) {
isp_free_buffer(fd);
close(fd);
return ret;
}
ret = isp_power_on(fd);
if (ret)
goto close_fd;
ret = isp_stream_on(fd);
if (ret)
goto close_fd;
......
/*Add any else API functions you want.*/
......
isp_stream_off(fd);
isp_power_off(fd);
close_fd:
isp_free_buffer(fd);
isp_close(fd, &info);
dev_fd = -1;
return ret;
}
isp 接口使用流程图如图3-3-1,图中左侧是程序流程图,中间是对应流程所使用到的接口函数,右侧是由isp_open() 函数生成 camera 设备句柄 fd,以及需要作为参数传给接口函数调用的接口结构体。
fd 由所有彩色框内的函数调用,摄像头出图属性结构体 frame_image_format 由绿色框内的函数调用,camera 信息结构体 camera_info 由橙色框内的函数调用。
4 ISP tuning 接口
libisp/src/lib 下的 isp_tuning.c 定义了多个isp效果调试模块接口结构体和接口函数,支持用户对摄像头的某些效果(曝光、白平衡、亮度、饱和度等)进行调试。
4.1 isp tuning 接口结构体
libisp 中主要的 isp tuning 接口结构体的定义位于/libisp/include/isp_tuning.h,下表简单介绍了 isp tuning 结构体的功能。
| 结构体/共用体 | 说明 |
|---|---|
| isp EV 参数结构体 struct isp_ev_attr | 存放 isp EV 参数信息,包括曝光模式(自动或手动)、曝光值、 曝光时间(当前、最大、最小)、模拟增益、数字增益、总增益。 |
| 曝光参数结构体 struct isp_core_expr_attr | 设置曝光模式、曝光时间、模拟增益 |
| isp 权重信息结构体 struct isp_weight | 设置 15 × 15 各区域 AE 权重 |
| 白平衡参数结构体 struct isp_core_wb_attr | 设置白平衡模式(自动、手动); 在手动模式下,可以设置白平衡红色增益、蓝色增益。 |
| gamma 参数结构体 struct isp_gamma | gamma 参数数组,有129个点构成 gamma 曲线 |
以上结构体的具体定义请查看 isp_tuning.c 及其头文件相关注释。
4.2 isp tuning 接口函数
libisp/src/lib 下的 isp_tuning.c 定义了多个 isp 效果调试模块接口函数。
-
tuning 设备开关
-
isp 工作模式(正常、夜视)
-
图像翻转(水平、垂直)
-
帧率设置
-
亮度、对比度、饱和度、锐度调节
-
抗频闪
-
设置曝光参数
-
强光抑制
-
白平衡
-
gamma
-
ADR强度
……
函数具体的声明、定义请查看 isp_tuning.c 及其头⽂件 isp_tuning.h。
4.3 isp tuning 接口使用
ISP tuning 接口使用前提:
1、sensor 经过 isp;2、isp 效果参数已经确定。
注:效果参数文件由 isp 驱动加载,该文件的路径(板子):/etc/sensor/xxx-x2000.bin。不同的 sensor 模组需要专门调试出属于自身的效果参数文件,若 sensor 没有效果参数文件,则使用默认的效果参数,出图效果较差。
4.3.1 代码修改
isp tuning 接口在 demo_isp.c 文件中通过宏定义的方式灵活选择调用或不调用。
这些 tuning 接口的宏默认状态是不开启,如需使用 tuning 接口,可自行修改 demo_isp.c 中接口宏定义取值(0或1),1表示开启,0表示关闭。最后编译 libisp 进板子后方可使用 demo_isp shell 命令查看结果。
#define TEST_ISP_TUNING_RUNNING_MODE 0 //运行模式(day or night)
#define TEST_ISP_TUNING_HFLIP 0 //水平翻转
#define TEST_ISP_TUNING_VFLIP 0 //垂直翻转
#define TEST_ISP_TUNING_SENSOR_FPS 0 //设置帧率
#define TEST_ISP_TUNING_BRIGHTNESS 0 //亮度
#define TEST_ISP_TUNING_CONTRAST 0 //对比度
#define TEST_ISP_TUNING_SATURATION 0 //饱和度
#define TEST_ISP_TUNING_SHARPNESS 0 //锐度
#define TEST_ISP_TUNING_ANTI_FLICKER_ATTR 0 //抗频闪
#define TEST_ISP_TUNING_EV_ATTR 0 //EV参数
#define TEST_ISP_TUNING_EXPR 0 //曝光参数
#define TEST_ISP_TUNING_MAX_AGAIN 0 //最大模拟增益
#define TEST_ISP_TUNING_AE_MIN 0 //AE最小参数
#define TEST_ISP_TUNING_AE_LUMA 0 //AE亮度参数
#define TEST_ISP_TUNING_HI_LIGHT_DEPRESS 0 //强光抑制
#define TEST_ISP_TUNING_AE_WEIGHT 0 //AE区域权重
#define TEST_ISP_TUNING_WB 0 //白平衡
#define TEST_ISP_TUNING_GAMMA 0 //gamma
#define TEST_ISP_TUNING_ADR_STRENGTH 0 //ADR强度
当开启某个模块功能时,先把 TEST_ISP_TUNING_xxx 设为1,再到宏对应模块修改参数。
例如:当需要调用亮度调试接口 TEST_ISP_TUNING_BRIGHTNESS 时,按下方步骤操作。
- 接口设为1
#define TEST_ISP_TUNING_BRIGHTNESS 1 //调用亮度接口
-
设置目标亮度值
亮度默认值为128,大于128增加亮度,小于128降低亮度。
#if TEST_ISP_TUNING_BRIGHTNESS
unsigned char brightness;
isp_tuning_set_brightness(fd_tuning, 130); //设置亮度值
isp_tuning_get_brightness(fd_tuning, &brightness); //获取亮度值
fprintf(stderr, "----Get_brightness, brightness = %u\n\n", brightness);
#endif
4.3.2 串口调试
代码改了以后:保存,编译 libisp,编译文件系统 buildroot,单独烧录文件系统到板子。
串口 shell 命令示例:
demo_isp /dev/mscaler0-ch0
回车后打印结果:
...... (sensor 信息)
Open isp tuning device isp-tuning0
----Get_brightness, brightness = 130
......(Save Frame to File(/tmp/frame.nv12))
注:isp tuning 设备节点名称与 demo_isp 命令打开的的 mscaler 设备节点有关,mscaler0 (所有channel) 对应 isp-tuning0;mscaler1 (所有channel) 对应 isp-tuning1。
获取的亮度值与设定的一致,可拉图片到电脑端查看(参考 2.3.2 内容)效 果。