X1600 SPI
1 SPI相关配置
1.1 Iconfig相关配置
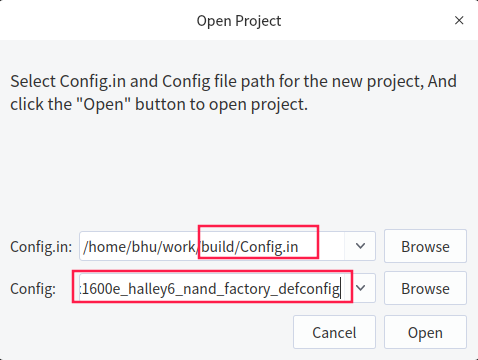
以x1600e_halley6_nand_factory_defconfig为例. 打开IConfigTool工具,选择配置文件
进入 [模块化驱动] 界面,点击进入 [驱动] 并且勾选配置如下配置:

勾选spi相关辅助命令

用户需要根据设备使用的是spi控制器驱动还是gpio_spi驱动,选择性地进行下列配置:
1.1.1 SPI控制器驱动配置
若新设备使用的是SPI控制器驱动,逐级进入到 [SPI总线] 的配置界面,进行相关配置:

1.1.2 GPIO_SPI驱动配置
若新设备使用的是GPIO_SPI驱动,逐级进入到 [gpio spi 驱动/设备] 的配置界面,进行相关配置:
当不能正常使用SPI控制器驱动时,请使用SPI控制器驱动所使用到的IO引脚来配置GPIO_SPI驱动,从而验证是硬件出现异常还是SPI控制器驱动出现异常

1.2 Kernel 相关配置
切换路径到对应版本内核的目录
bhu@bhu-PC:~/work/build$ grep -nr "kernel" configs/x1600e_halley6_nand_factory_defconfig //先查看kernel的配置
6:APP_kernel_dir=../kernel/kernel-x2000
7:APP_kernel_config=x1600_halley6_module_base_linux_sfc_nand_defconfig //kernel配置文件
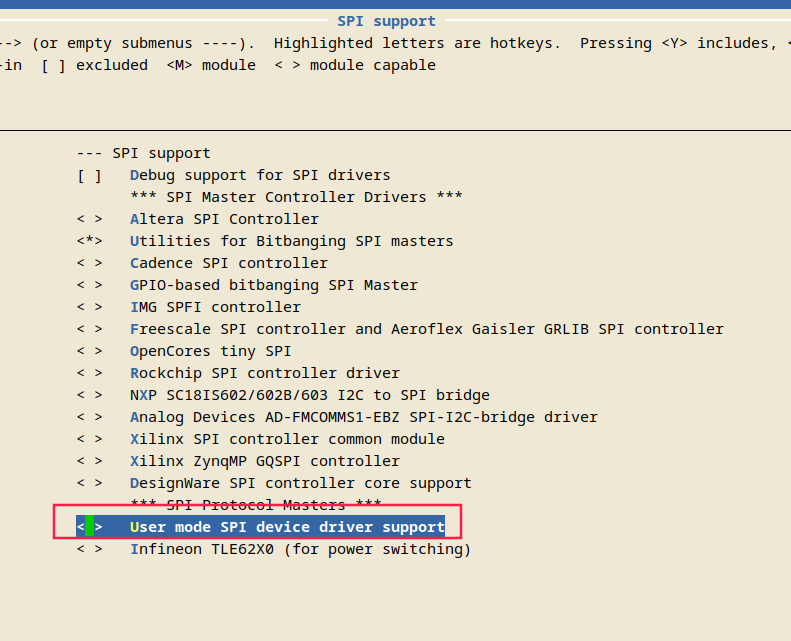
打开menuconfig, 取消勾选内核的spidev配置,使用模块的spidev驱动
make menuconfig
#进入到spidev所在路径,取消勾选spidev配置:
Device Drivers --->
[*] SPI support --->
< > User mode SPI device driver support
#保存配置后,退出menuconfig
保存配置
bhu@bhu-PC:~/work/kernel/kernel-x2000$ cp .config arch/mips/configs/x1600_halley6_module_base_linux_sfc_nand_defconfig
1.3 编译烧录
重新编译配置
bhu@bhu-PC:~/work/build$ make x1600e_halley6_nand_factory_defconfig
bhu@bhu-PC:~/work/build$ make
烧录固件, 没烧录过见烧录说明
2 SPI设备驱动层使用说明
本章将先介绍设备驱动层相关接口,再通过示例程序说明相关接口的用法
2.1 SPI驱动层接口说明
/*君正封装的接口*/
struct spi_device *spi_register_device(struct spi_board_info *info, int spi_bus_num)
功能:注册spi设备
参数:info //SPI设备板级信息结构体
spi_bus_num //SPI总线号
返回值:注册成功返回的spi_device结构体指针 //非空:注册成功 空:注册失败
/*内核提供的接口*/
int spi_register_driver(struct spi_driver *sdrv)
功能:注册spi设备驱动
参数:sdrv //SPI设备驱动结构体
返回值:0:注册成功 <0:注册失败
void spi_unregister_device(struct spi_device *spi)
功能:注销spi设备
参数:spi //注销指定的spi设备
返回值:空
void spi_unregister_driver(struct spi_driver *sdrv)
功能:注销spi设备驱动
参数:sdrv //注销指定的spi设备驱动
返回值:空
int spi_write_then_read(struct spi_device *spi,const void *txbuf, unsigned n_tx,
void *rxbuf, unsigned n_rx)
功能:SPI同步写入数据后读取数据
参数:spi //要进行数据读写的spi设备
txbuf //数据发送缓冲区
rxbuf //数据接收缓冲区
n_tx //数据发送缓冲区大小
n_rx //数据接收缓冲区大小
返回值:0:成功 <0:失败
2.2 SPI设备驱动实例
2.2.1 编写示例程序
//示例代码 m_spi_dev.c
#include <linux/module.h>
#include <linux/kernel.h>
#include <soc/gpio.h>
#include <linux/spi/spi.h>
#define BUF_LEN 80
static int spi_bus_num = 0; // 设置spi总线号
static struct spi_device *m_dev;
struct spi_device *spi_register_device(struct spi_board_info *info, int spi_bus_num)
{
struct spi_master *master = spi_busnum_to_master(spi_bus_num);
struct spi_device *dev;
if (!master) {
printk(KERN_ERR "error:failed to get spi master %d\n",spi_bus_num);
return NULL;
}
info->bus_num = spi_bus_num;
dev = spi_new_device(master, info);
if (!dev) {
printk(KERN_ERR "can not register spi device to %d busnum!",
spi_bus_num);
}
spi_master_put(master);
return dev;
}
static int m_spi_probe(struct spi_device *pdev)
{
/* 设备与驱动匹配成功后在此处进行SPI传输测试 */
int i,ret;
unsigned char txbuf[BUF_LEN];
unsigned char rxbuf[BUF_LEN];
for (i = 0; i < BUF_LEN; i++) {
txbuf[i] = i;
}
ret = spi_write_then_read(pdev,&txbuf[0], BUF_LEN, &rxbuf[0], BUF_LEN);
if (ret < 0) {
printk(KERN_ERR "m_new_spi_device:spi_write_then_read failed\n");
return ret;
}
for (i = 0; i < BUF_LEN; i+=8) {
printk(KERN_ERR "%02x %02x %02x %02x %02x %02x %02x %02x\n",
rxbuf[i],rxbuf[i+1],rxbuf[i+2],rxbuf[i+3],
rxbuf[i+4],rxbuf[i+5],rxbuf[i+6],rxbuf[i+7]);
}
printk(KERN_ERR "\n%d Bytes spi data transfer finished...\n",BUF_LEN);
return 0;
}
static int m_spi_remove(struct spi_device *pdev)
{
printk(KERN_ERR "m_new_spi_device is removed...\n");
return 0;
}
static struct spi_device_id id_table[] = {
{
.name = "m_new_spi_device",
}
};
//配置SPI设备驱动结构体
static struct spi_driver m_spi_driver = {
.driver = {
.name = "m_new_spi_device", // 设备驱动名称
.bus = &spi_bus_type, // 驱动总线类型
.owner = THIS_MODULE,
},
.id_table = id_table, // 用于匹配设备与驱动
.probe = m_spi_probe,
.remove = m_spi_remove,
};
//配置SPI设备板级信息结构体
static struct spi_board_info m_spi_device = {
.modalias = "m_new_spi_device", // SPI设备名称:m_new_spi_device
.max_speed_hz = 10 * 1000 * 1000, // SPI最高速率:10Mhz
.mode = SPI_MODE_3, // SPI传输模式:模式3
.controller_data = (void *)(GPIO_PC(16)), // 设置片选引脚为GPIO_PC(16)
// 若不使用片选,设置为-1
.chip_select = 0, // 没有使用到的片选设置
// 在同一SPI总线上,可能有多个SPI设备
// 该值要保持唯一性,大小不能超过num_chipselect
};
static int __init m_spi_init(void)
{
// 注册spi设备驱动
int ret = spi_register_driver(&m_spi_driver);
if (ret) {
printk(KERN_ERR "m_new_spi_device: failed to register spi driver\n");
ret = -1;
goto err_register_driver;
}
// 注册spi设备
m_dev = spi_register_device(&m_spi_device, spi_bus_num);
if (m_dev == NULL) {
printk(KERN_ERR "m_new_spi_device: failed to register spi device\n");
ret = -1;
goto err_register_device;
}
return 0;
err_register_device:
spi_unregister_driver(&m_spi_driver);
err_register_driver:
return ret;
}
static void __exit m_spi_exit(void)
{
printk(KERN_ERR "spi device driver exit...\n");
// 注销spi设备
spi_unregister_device(m_dev);
// 注销spi设备驱动
spi_unregister_driver(&m_spi_driver);
}
module_init(m_spi_init);
module_exit(m_spi_exit);
MODULE_DESCRIPTION("Add new spi device driver demo");
MODULE_LICENSE("GPL");
2.2.2 如何使用
本章中的测试为SPI的自发自收传输实验,在进行测试前确保SSI0_DT(发送)和SSI0_DR(接收)引脚已经用杜邦线进行连接
1.编译编写的新spi设备驱动并使用adb工具下载编译好的驱动到开发板(驱动编译方法参考独立编译ko文件添加方式 )
adb push m_spi_dev.ko /tmp
2.进入tmp目录并且加载新的spi设备驱动
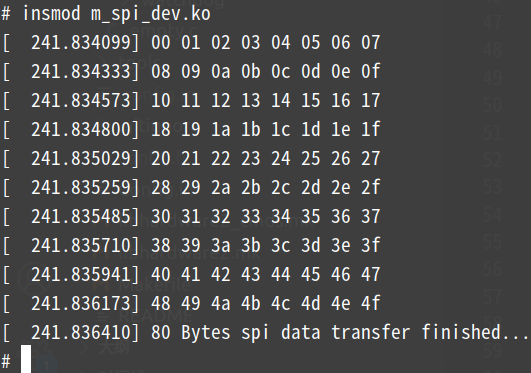
insmod m_spi_dev.ko
3.加载新的spi设备驱动后,缓冲区数据如下图所示,说明spi数据传输成功
3 SPI应用层使用说明
本章将先介绍应用层相关接口,再通过示例程序说明相关接口的用法
3.1 SPI应用层结构体及接口说明
3.1.1 包含头文件
#include <libhardware2/spi.h>
3.1.2 SPI_应用层结构体说明
SPI信息结构体配置
struct spi_info {
unsigned char spi_mode; //SPI传输模式
unsigned int spi_speed; //SPI传输速率
unsigned char spi_bits; //SPI传输每个字的位数
unsigned char spi_lsb; //SPI传输数据低位的顺序
};
SPI数据传输结构体配置
struct spi_ioc_transfer {
__u64 tx_buf; //指向用户空间数据发送缓冲区的指针
__u64 rx_buf; //指向用户空间数据接收缓冲区的指针
__u32 len; //缓冲区长度,单位为字节
__u32 speed_hz; //设备比特率
__u16 delay_usecs; //传输中最后一位传输后延迟的时间
__u8 bits_per_word; //每个字的位数
__u8 cs_change; //在开始下一次传输之前取消选择设备
__u8 tx_nbits; //定义几线发送(1、2、4线可选) 0默认单线传输
__u8 rx_nbits; //定义几线接收(1、2、4线可选) 0默认单线传输
__u8 word_delay_usecs; //每传输完毕一个字,开始传输下一个字延迟的时间
__u8 pad;
};
3.1.3 SPI_应用层接口功能说明
接口具体实现查阅工程代码目录 libhardware2/src/lib/spi/spi.c
int spi_open(char *spidev_path) //功能:打开指定的spi设备
void spi_close(int spi_fd) //功能:关闭指定的spi设备
int spi_transfer(int spi_fd, struct spi_ioc_transfer *spi_tr, int num) //功能:SPI传输(收发)
int spi_read(int spi_fd, char *rx_buf, int len) //功能:SPI数据接收
int spi_write(int spi_fd, char *tx_buf, int len) //功能:SPI数据发送
int spi_set_mode(int spi_fd, int mode) //功能:设置SPI传输模式
int spi_set_speed(int spi_fd, int speed) //功能:设置SPI传输速率
int spi_set_bits(int spi_fd, int bits_per_word) //功能:设置spi传输时的位数
int spi_set_lsb(int spi_fd, int lsb_first) //功能:设置spi传输时数据的高低位发送顺序
void spi_get_info(int spi_fd, struct spi_info *spi) //功能:获取SPI的配置信息
int spi_add_device(struct spidev_register_data *data) //功能:添加spi设备
int spi_del_device(char *spidev_path) //功能:删除spi设备
3.2 测试方法
本章中的测试为SPI的自发自收传输实验,在进行测试前确保SSI0_DT(发送)和SSI0_DR(接收)引脚已经用杜邦线进行连接
3.2.1 使用SPI辅助命令
#使用cmd_spi add_dev命令进行spi设备的添加
1.cmd_spi add_dev 0 pc16 #0:spi总线号 pc16:片选引脚
/dev/spidev0.0
#使用cmd_spi transfer进行5个字节的数据传输实验
2.cmd_spi transfer /dev/spidev0.0 0x00 0x01 0x02 0x03 0x04
receive[0]: 00
receive[1]: 01
receive[2]: 02
receive[3]: 03
receive[4]: 04
#数据接收缓冲区能正确接收到发送的数据,说明spi数据传输成功
#使用cmd_spi set对spi设备属性设置,并且用cmd_spi info查看是否设置成功
3.cmd_spi set /dev/spidev0.0 mode=0x03 speed=500000 bits=8 lsb=0
4.cmd_spi info /dev/spidev0.0
mode speed bits lsb
03 500000 8 0
#使用cmd_spi del_dev删除指定spi设备
5.cmd_spi del_dev /dev/spidev0.0
3.2.2 编写示例程序
编译示例程序,使用adb工具push到/tmp目录下并运行(应用编译方法参考上层应用程序添加方法 )
#include <stdio.h>
#include <unistd.h>
#include <string.h>
#include <libhardware2/spi.h>
#define BUF_LEN 240
int main()
{
int spi_fd = -1;
char cs_gpio[5] = "pc09";
/* 1.spi初始化 */
struct spidev_register_data register_data = {0};
register_data.cs_gpio = cs_gpio;
register_data.busnum = 0;
// 1.1.注册spi设备
if(spi_add_device(®ister_data) < 0) {
printf("spi register fail\n");
return -1;
}
// 延时等待设备节点生成
usleep(1000*1000);
// 1.2.打开spi设备
spi_fd = spi_open(register_data.spidev_path);
if (spi_fd < 0) {
printf("spi open fail,spi_fd=%d\n",spi_fd);
return -1;
}
// 1.3.设置spi传输模式 SPI_MODE_3
if (spi_set_mode(spi_fd, SPI_MODE_3) < 0) {
printf("spi set mode fail \n");
return -1;
}
// 1.4.设置spi传输速率
if (spi_set_speed(spi_fd, 10 * 100000) < 0) {
printf("spi set speed fail\n");
return -1;
}
// 1.5.设置spi传输的数据位数
if (spi_set_bits(spi_fd, 8) < 0) {
printf("spi set bits fail\n");
return -1;
}
// 1.6.设置spi传输数据高低位发送顺序
if (spi_set_lsb(spi_fd, 0) < 0) {
printf("spi set lsb fail \n");
return -1;
}
printf("spi init ok...\n");
/* 2.spi数据传输 */
unsigned char rx_buf[BUF_LEN] = {0};
unsigned char tx_buf[BUF_LEN] = {0};
for (int i = 0; i < BUF_LEN; i++) {
tx_buf[i] = i;
}
// 2.1.配置spi传输结构体
struct spi_ioc_transfer spi_msg = {
.len = BUF_LEN,
.rx_buf = (unsigned long)rx_buf,
.tx_buf = (unsigned long)tx_buf,
.speed_hz = 0,
.bits_per_word = 8,
};
// 2.2.spi收发数据
if (spi_transfer(spi_fd, &spi_msg, 1) < 0) {
printf("spi transfer fail\n");
return -1;
}
for (int i = 0; i < BUF_LEN; i++) {
if (i % 24 == 0) {
printf("\n");
}
printf(" %02x ",rx_buf[i]);
}
// 2.3.注销spi设备
if (spi_del_device(register_data.spidev_path) < 0) {
printf("\nspi unregister fail\n");
}
printf("\nspi unregister ok...\n");
return 0;
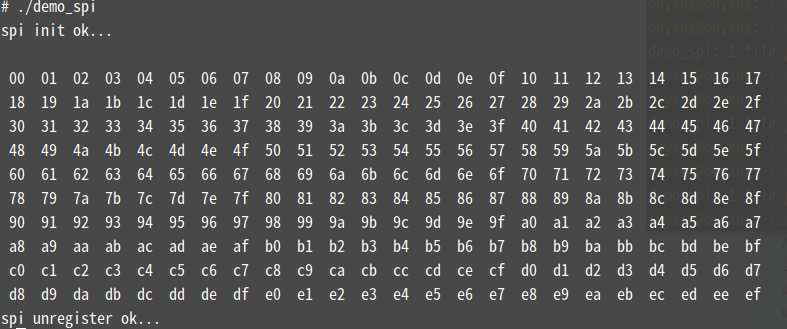
}
运行 demo_spi.c 程序,缓冲区数据如下图所示,说明spi数据传输成功