X2580 配置相关驱动的方法
1 开发板 IConfigTool 配置方法
x2580_evb_v1.0 开发板完成以下配置,编译通过后可运行 AI code 应用实例。
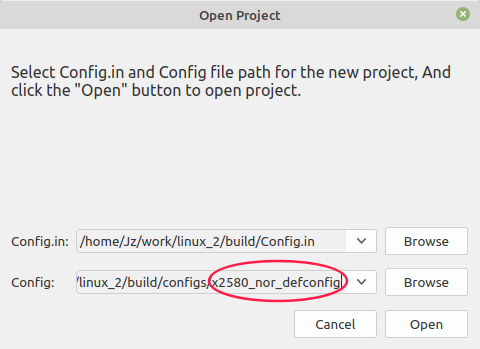
1.1 选择配置文件
选 x2580_nor_defconfig,点击 "open"
1.2 配置camera
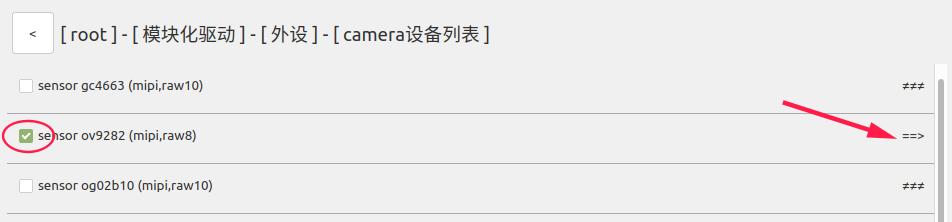
以 sensor ov9282 为例。
1.2.1 配置 camera 外设
- 进入路径:[root]-[模块化驱动]-[外设]-[camera设备列表]-[sensorov9282(mipi,raw8)]
- 根据开发板及sensor转接板原理图配置power gpio, reset gpio, pwdn gpio, i2c 总线号(默认配置已配好)。
 注:i2c 总线号与2.2 I2C 配置选择的 i2c 号要对应
注:i2c 总线号与2.2 I2C 配置选择的 i2c 号要对应
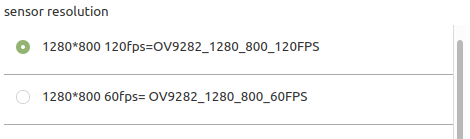
- 选择分辨率(视具体sensor情况而定,不是每个sensor 都需要选分辨率)
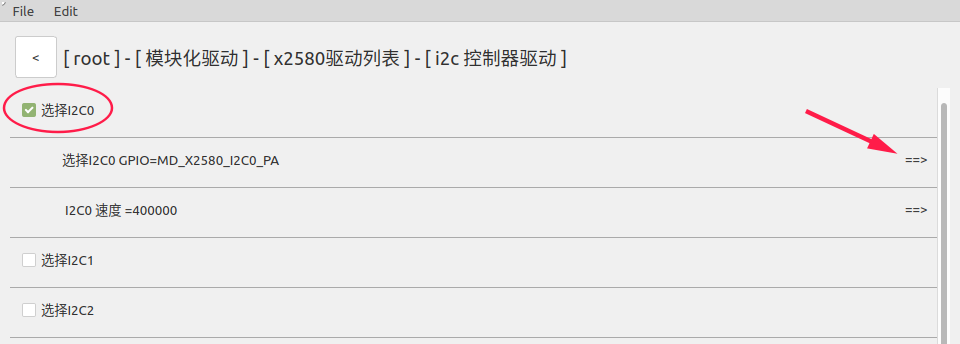
1.2.2 配置 I2C
I2C 依据原理图配置,x2580_evb_v1.0 开发板适配 ov9282 时的 I2C 引脚scl:PA13,sda:PA12。
- 进入路径:[root]-[模块化驱动]-[x2580驱动列表]-[i2c控制器驱动]
- 勾选i2c0,选择 SCL:GPIO_PA(13) SDA:GPIO_PA(12)

1.2.3 配置 soc_camera
配置 soc camera 目的是配置 vic 控制器。
- 进入路径:[root]-[模块化驱动]-[x2580驱动列表]-[camera驱动(vic控��制器)]
- 勾选“选择vic控制器”
- VIC MCLK 默认 PA15 GPIO

- 数据通路选择不过isp(目前ISP功能尚未完善)
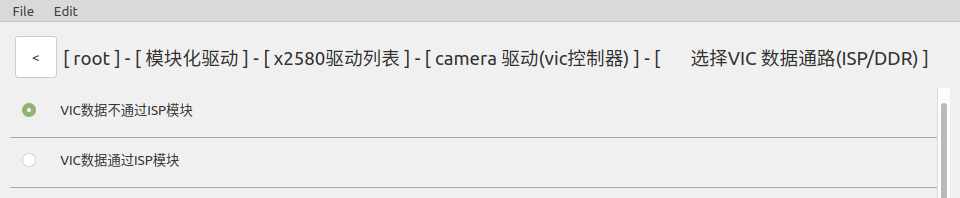
- 帧缓冲数默认2,驱动+1
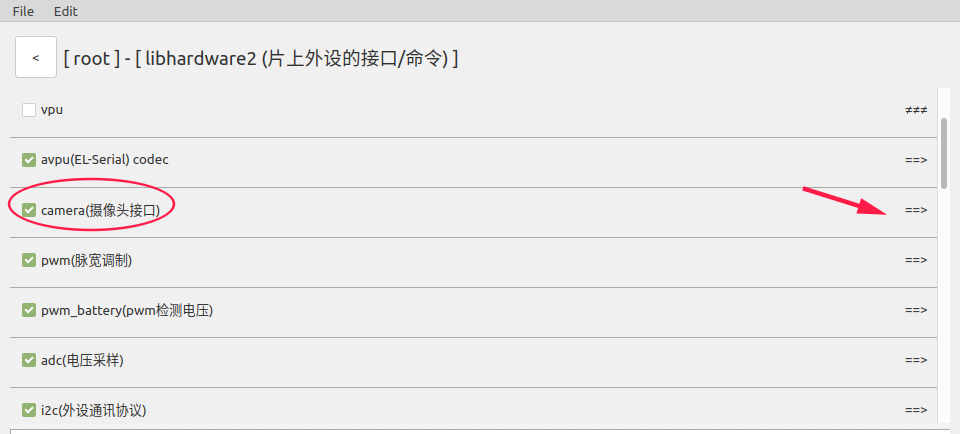
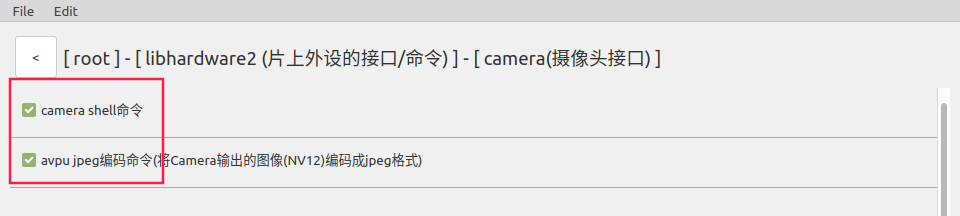
1.2.4 配置 cmd camera
- 进入路径:[ root ] - [ libhardware2 (片上外设的接口/命令) ], 勾选“camera(摄像头接口)”, 右侧进入选项,全部勾选。
1.3 配置 npu
1.3.1 配置 soc draw box
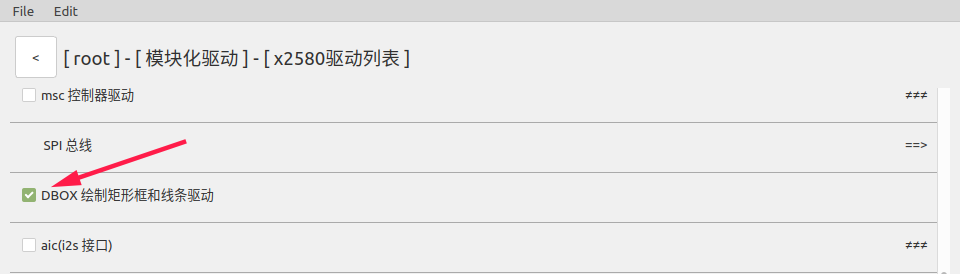
- 进入路径:[ root ] - [ 模块化驱动 ] - [ x2580驱动列表 ]
- 勾选“DBOX 绘制矩形框和线条驱动”
1.3.2 配置 cmd draw box
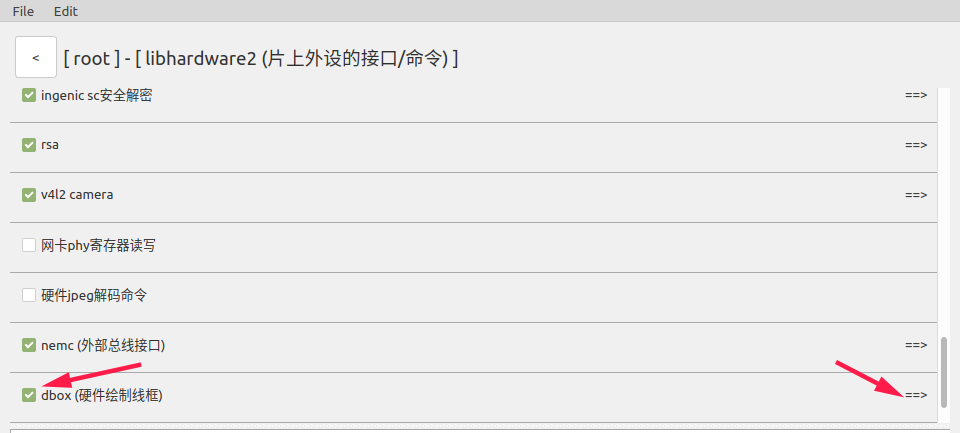
- 进入路径:[ root ] - [ libhardware2 (片上外设的接口/命令) ]
- 勾选“dbox (硬件绘制线框)”,右侧箭头进入选项,勾选“dbox shell 命令”